Prosthetic foot/ankles
MIT Ankle
This is accomplished through a device equipped with multiple springs and a small battery-powered motor. The energy produced from the forward motion of the person wearing the prosthesis is stored in the power-assisted spring, and then released as the foot pushes off. Additional mechanical energy is also added to help momentum.
PowerFoot BiOM
The BiOM is a bionic lower-leg system with reflexive powered plantar flexion that simulates the action of the ankle, Achilles tendon and calf muscles by propelling the amputee upwards and forwards during each walking step. The reflexive action in the BiOM performs net work on every step and returns 100% of the energy of a biological limb while accommodating for real time terrain changes, thus normalizing the individual's gait dynamics. The BiOM senses ankleÆs position and forces in real time and reacts seamlessly to environment. Translating approximately 250 data points per step though complex algorithms and circuit boards, the system tells the actuator to retract or extend. When the actuator retracts, it pulls the series spring up, similar to the loading of a catapult. At the end of step, the actuator retracts further and the spring releases stored energy. This is the powered plantar flexion that emulates the action of the calf muscles and Achilles tendon.
PROPRIO FOOT

This super smart foot delivers a level of functionality that is as close as you can get today to its human counterpart. Capable of independent thought, it responds beautifully in any situation. Transforms the approach to stairs and slopes, as well as level-ground walking. Reacts immediately, automatically and naturally. Helps to make life a whole lot easier.
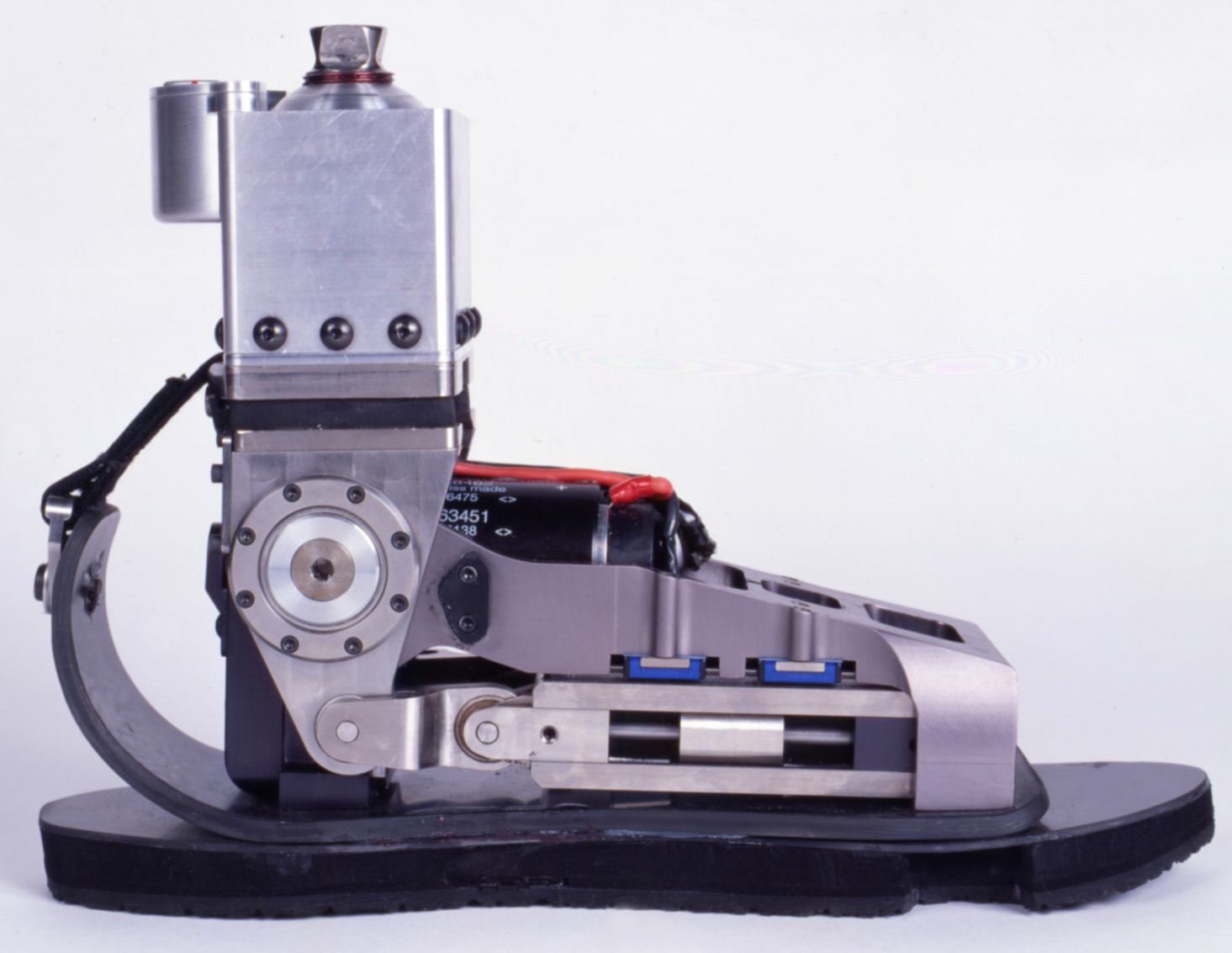
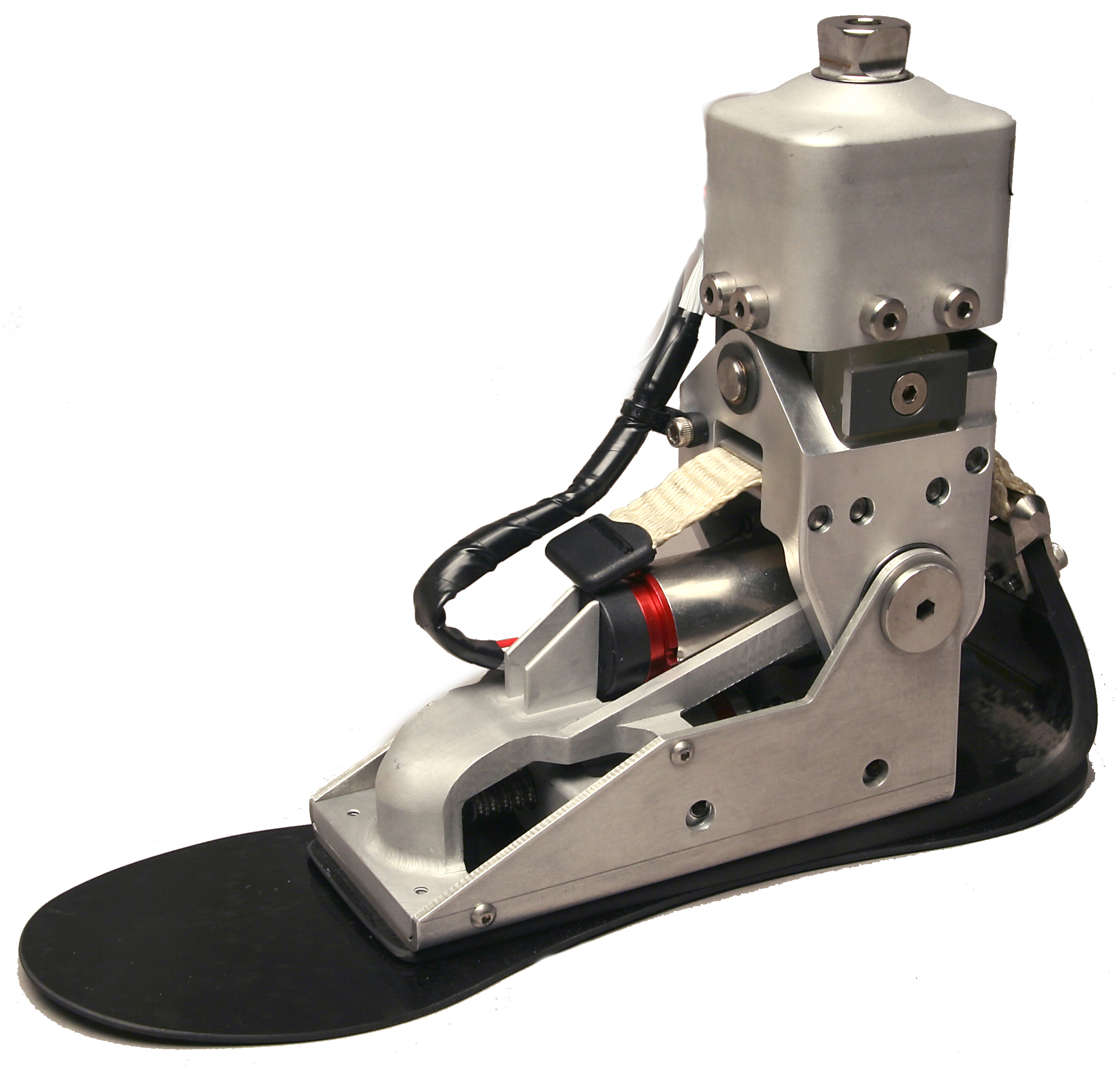
Energy-Recycling Foot
This energy-recycling artificial foot captures collision energy and returns it for push-off. When the heel contacts the ground at the beginning of a stride, the rear-foot component rotates and compresses a coil spring. At maximum compression, the rear-foot is latched by a continuous one-way clutch. It then releases the fore-foot, and the spring provides push-off as the person begins to unload the trailing leg, with timing similar to normal ankle push-off. The only active elements are a microcontroller and two micro-motors that release the energy-storing spring and reset the mechanism. The device is powered by a small battery at about 0.8 W of electricity.
see full article... or go here...
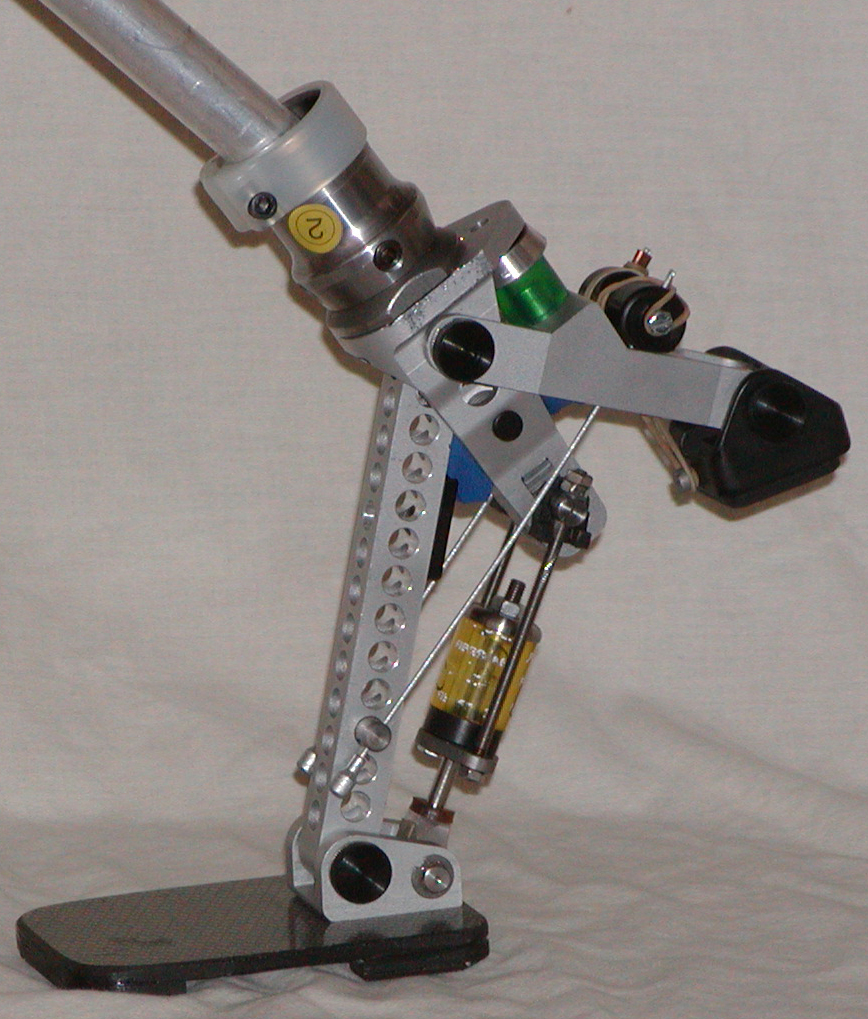
Pathfinder II Foot

The Pathfinder II Foot has unique construction: a toe spring, a foot plate, and a pneumatic heel spring all connected in a triangular configuration. This design provides shock absorption during heel strike without diminishing the energy return of the toe spring, resulting in optimal flexibility, stability, and comfort. An improved bearing system at the proximal and distal ends of the heel spring alleviate medial/lateral loading on the pneumatic cylinder. The improved bearing system allows increased inversion/eversion in the foot.
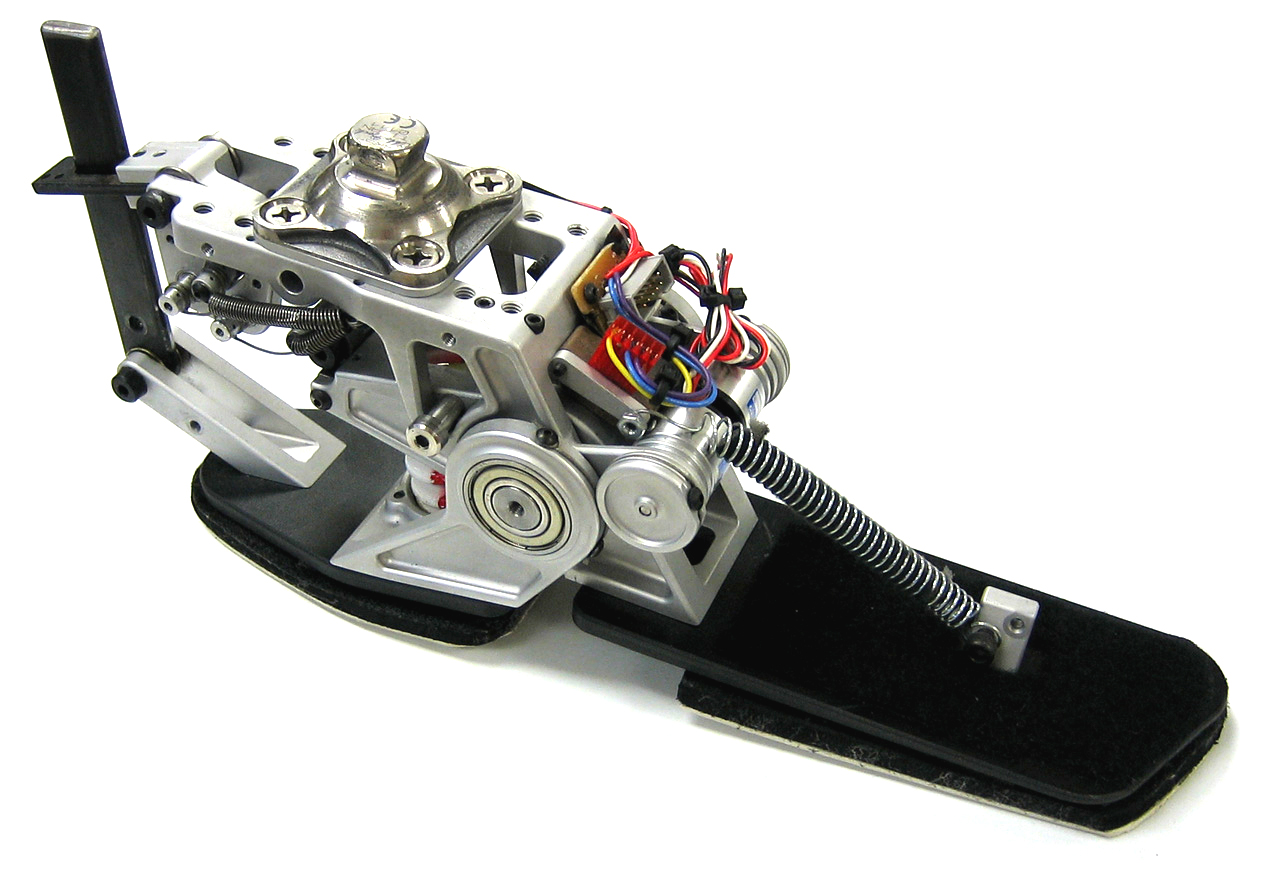
HEELFOOT
The HEELFOOT (Highly Efficient Energetic Locomotion Foot) is an anatomically inspired prosthetic foot: By mimicking the windlass effect (which causes the forefoot to rotate downward with a relative upward rotation of the big toe) a more natural extension (plantar flexion) of the prosthetic foot is established during the end of the prosthetic stance phase. This results in a longer and better support of the prosthetic/orthotic walker giving the perception of more comfortable and energy efficient prosthetic walking.
Robot legs
Sherpa legs

This biped robotic device Sherpa was dedicated to load carrying, by being close to several important features of humans or animals, and by imagining, from start, as an artificial entity equipped with bio-inspired control methods based on a large set of sensors.
Shadow legs
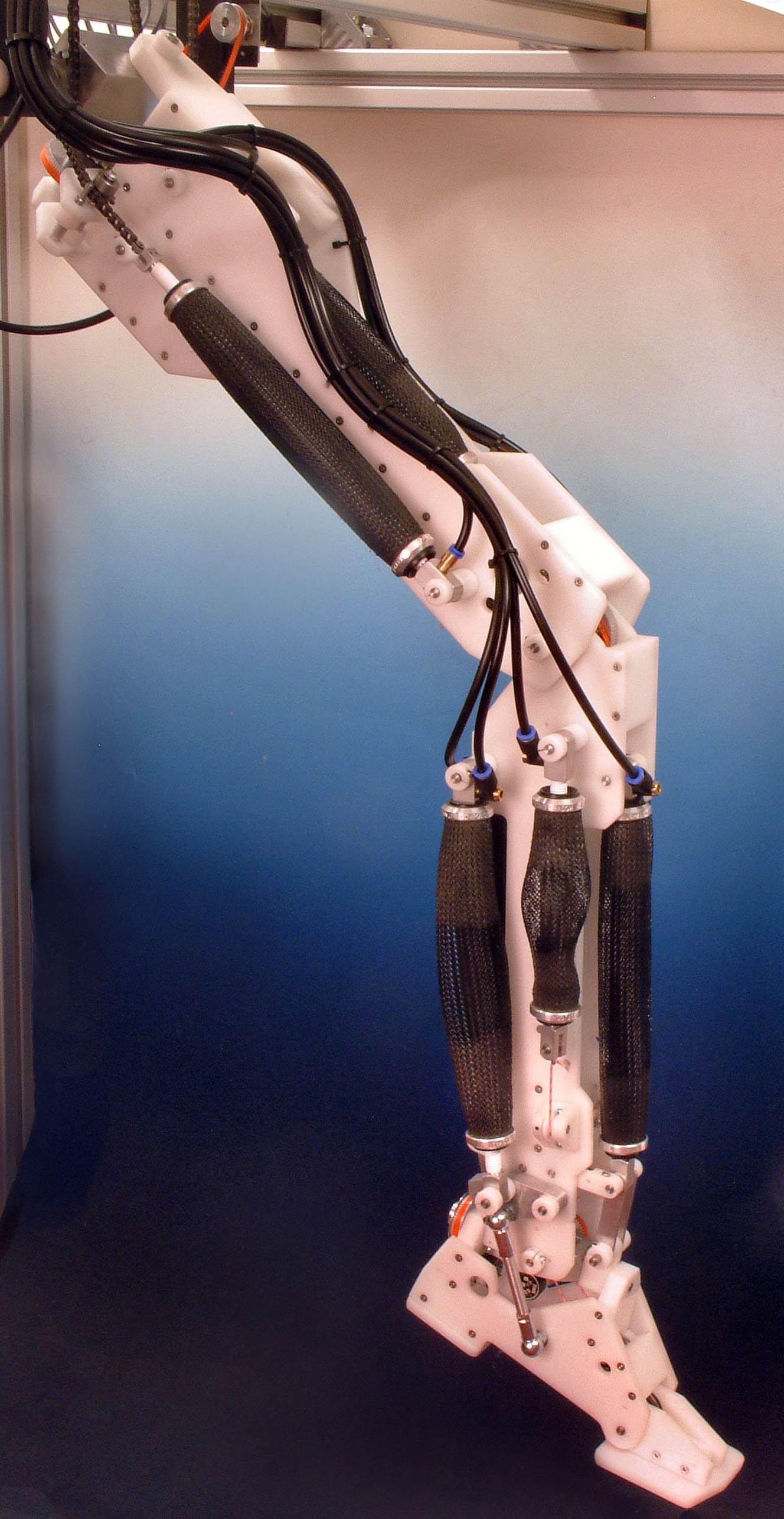
The human sized robotic leg was made for the Shadow Robot Co. The legs actuators are Shadow Air muscles, material - white acetyl plate. The legs control system was fitted with that as used by the Shadow Hand. All joints are fitted with potentiometers for positional feedback; the air delivery system monitors the pressure in each muscle; from these the working loads on the leg can be calculated. The movement speed is comparable to normal human walking in a domestic environment. The leg is capable of supporting a 1 Kg payload at the ankle throughout all its movement range. The leg was designed to hang from a frame and mimic the movements of a human control leg.
Bipedal Legs

The robotic lower limb was developed to aid research into very low energy strategies of walking inspired by human ambulation. The limb has been supplied original foot and ankle, knee and hip designs.