The best robot heads/faces
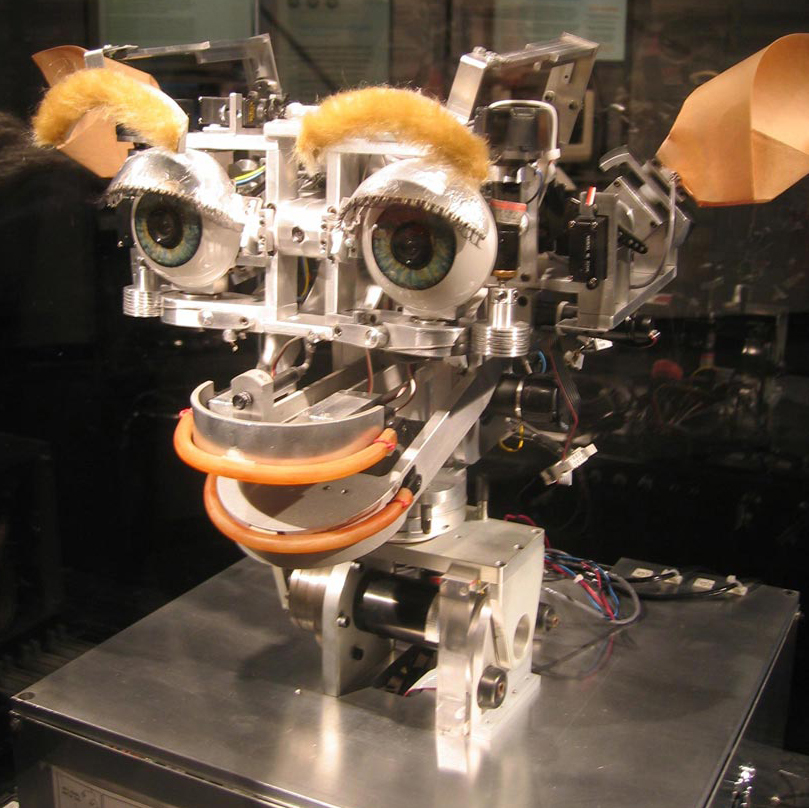
ROMAN
The best!!!

Robotics Research Lab Department of Computer Science University of Kaiserslautern Germany
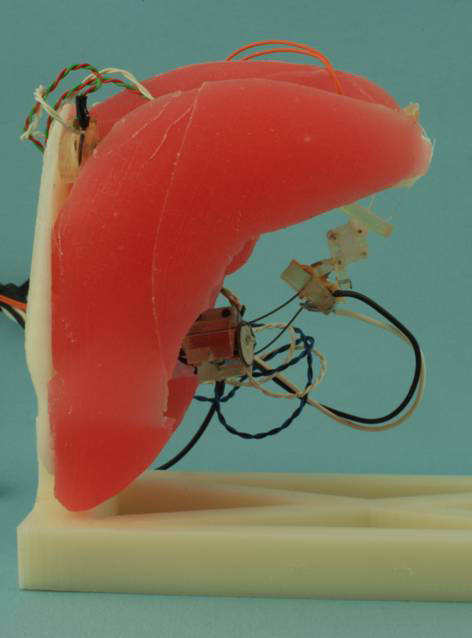
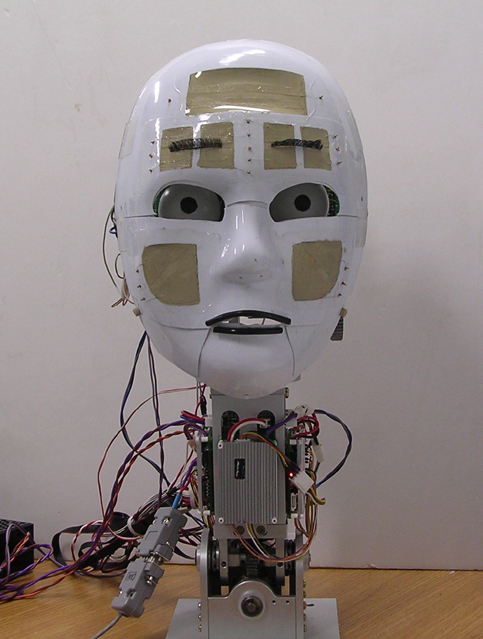
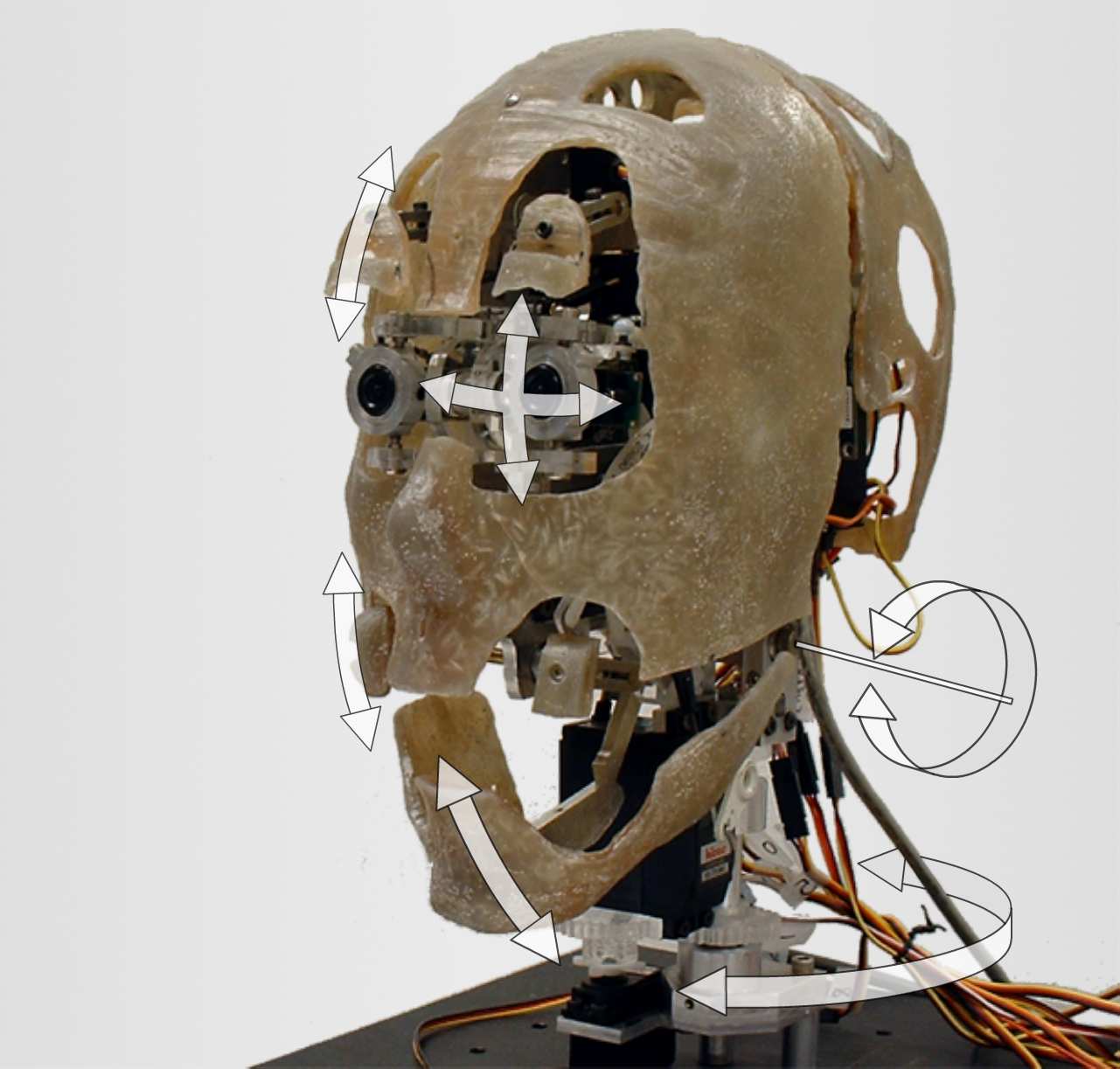
The mechanics of the humanoid head consists of a basic unit of mounting plates which is fixed to the 4 DOF neck. These plates are the mounting points for the eyes, the servo motors, and the cranial bone consisting of lower jaw, forehead and the back of the head. The artificial skin of the robot is glued onto the cranial bone and can be moved with 8 metal plates, which are connected to 10 servos via wires. The eyeballs can be moved independently up/down and left/right. The upper eyelid can also be moved.
KISMET
The hardware and software control architectures have been designed to meet the challenge of real-time processing of visual signals (approaching 30 Hz) and auditory signals (8 kHz sample rate and frame windows of 10 ms) with minimal latencies (less than 500 ms). The high-level perception system, the motivation system, the behavior system, the motor skill system, and the face motor system execute on four Motorola 68332 microprocessors running L, a multi-threaded Lisp developed in our lab. Vision processing, visual attention and eye/neck control is performed by nine networked 400 MHz PCs running QNX (a real-time Unix operating system). Expressive speech synthesis and vocal affective intent recognition runs on a dual 450 MHz PC running NT, and the speech recognition system runs on a 500 MHz PC running Linux.
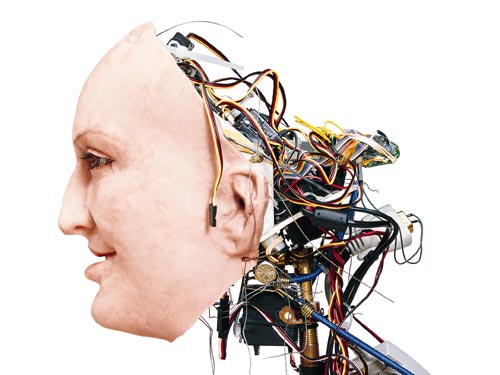
Hanson Robotics Inc. (HRI)
Advanced robot head projects
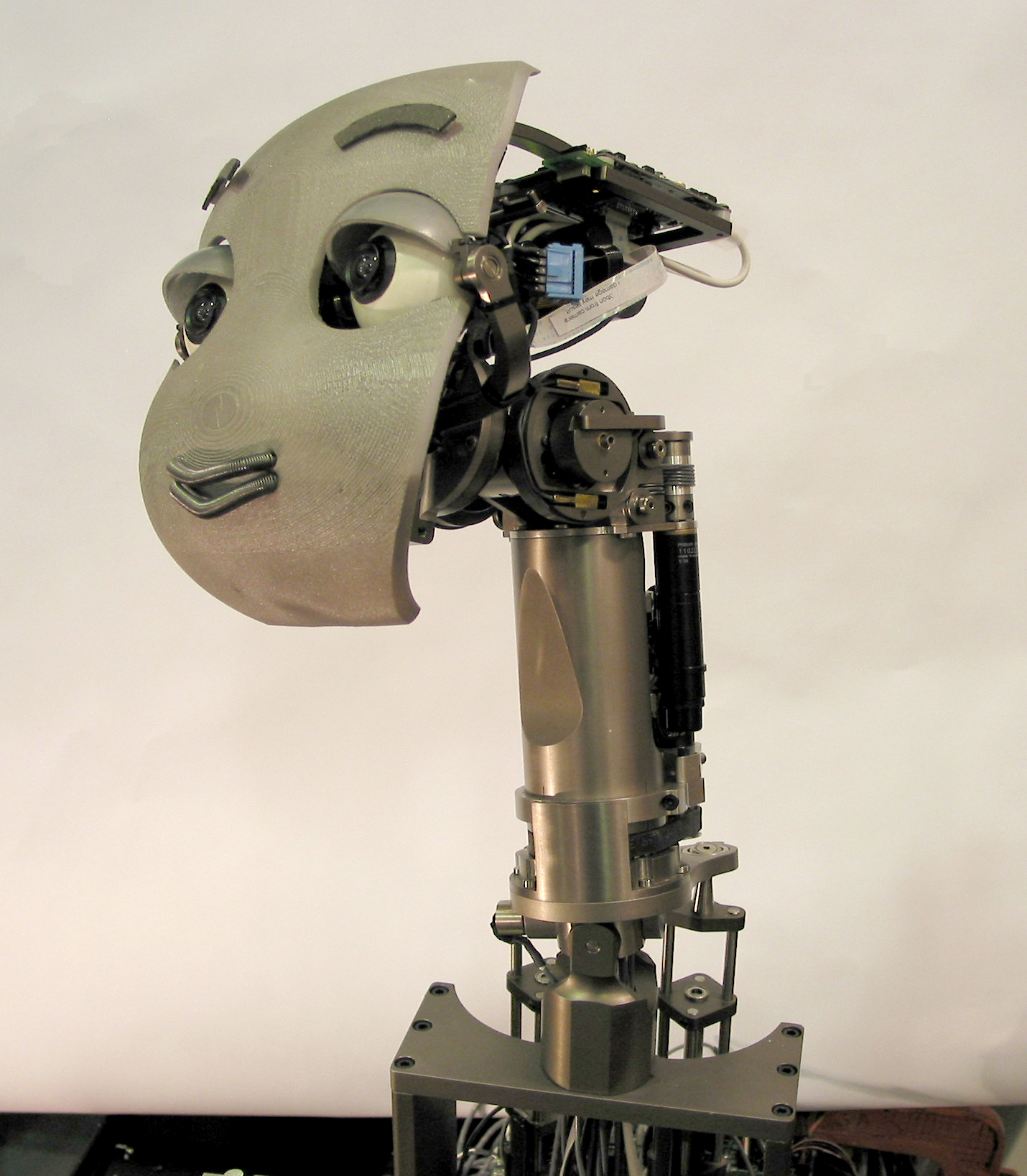
S1 Head

The S1 head includes a 3 DOF active vision camera system capable of quick saccades, smooth pursuit, and vengeance. The 4 DOF neck and two independent eyelids allow for a wide range of expressive emotional display such as happy, surprised, sad, and sleepy. Optional 4 DOF ears with RGB Led displays provide additional opportunities for emotional displays.
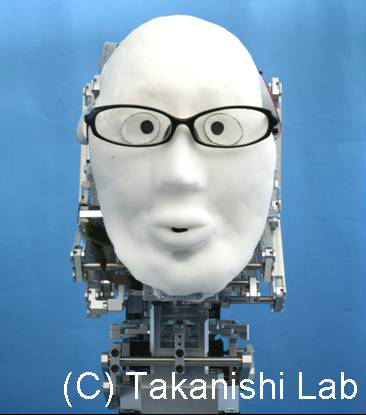
FR-i Head
A facial expression robot FR-i was designed with moving eyes, eye brows, and flexible lips. It looks in the direction of people nearby, detects facial features (such as eyes and mouth) and can copy or simply display a variety of expressions..
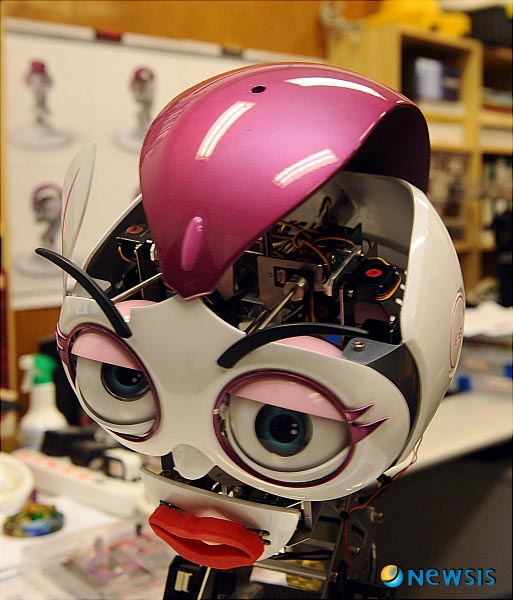
FloBi

CITEC Center of Excellence Cognitive Interaction Technology
Robot FloBi has been specifically designed to display a wide range of emotions, which are not real feelings, but are shown through the doll-like features put on it. FloBi has been provided with 18 movement points between its head and neck, and also has a magnetic actuator at the interior of the head which shall be responsible for the movement of the lips. Even for a more lifelike approach to FloBi, provision for independent movement has been provided for the eyebrows, neck, lips, eyes and eyelids.
David Ng Head
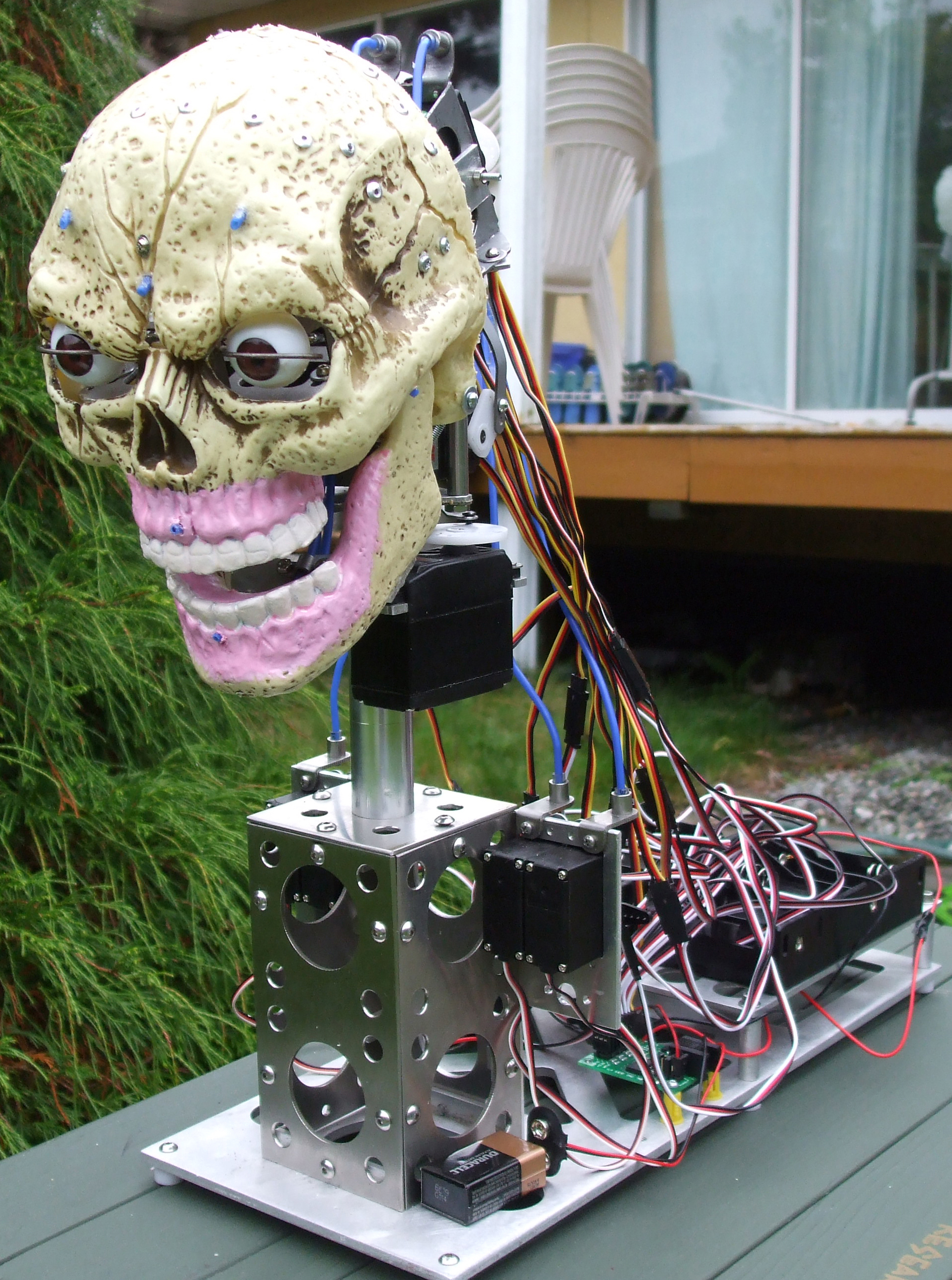
David Ng, Vancouver, BC, Canada
The complete head includes plexiglass skull, silicone skin, plexiglass display stand, 16 servo motors, two Scott Edwards Mini-SSC servo controllers, wig, R/C control unit to operate the head and detailed operating manual. Animatronic actions include: move eyes left & right, open & close eyelids, open & close jaw, smile, frown, lift eyebrows up, kissing, neck motion, turn head left & right. This is a very interesting and advanced device!
see more in Robot Heads of David Ng (pdf). For baying address David Ng
ToMoMi Head
ToMoMi is a robotic head platform that allows functionality to be added to as your research needs grow. Configurations of ToMoMi are limitless, from additional degrees of freedom, additional neck motions, skin color, CMOS eyes, etc. In basic configuration included custom polysiloxane face, composite skull, 19 HS-82MG Hitec servos, 2 JR DS-378 low profile servos, 1 JR z9100s servo. ToMoMi is compatible with color camera PC207XP (one per eye), allowing stereoscopic vision research and full ToMoMi body for human-sized display and/or additional motions (functional arms, etc). ToMoMi is controlled by any PWM servo controller, microcontroller, or simple RC system. This is not a toy, but the most complex off-the-shelf animatronic robotic head in the world, intended for experienced robotics enthusiasts and research organizations.
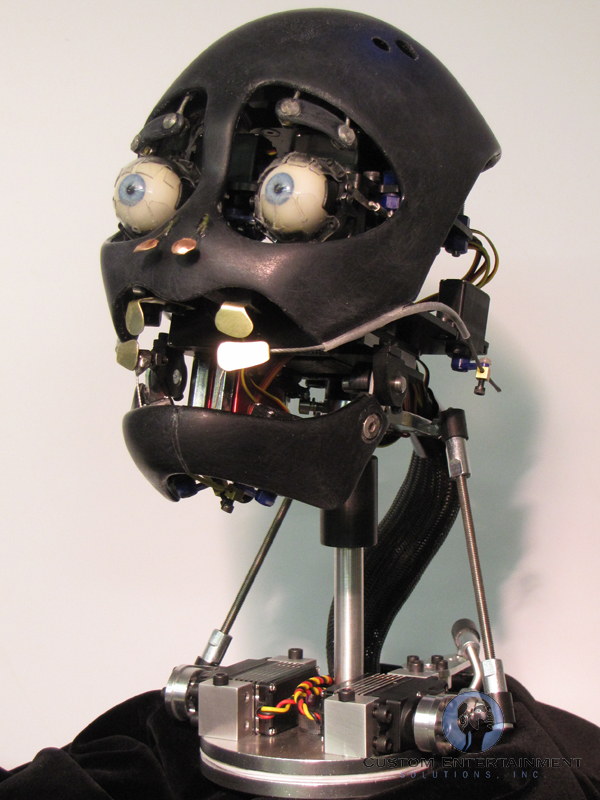
Mecha Hitsu Gen2

The Mecha Hitsu Gen2 animatronic head provide a robust mechanical head platform for any number of applications. The design allows for the programmer to animate this head quickly. A standardized ½” neck socket at the back/base of the head allows for easy connection to an existing robotic or animatronics figure or Industrial Animatronic Neck Mechanism. Custom Entertainment Solutions can also provide tailor-made animatronic robotics to your specifications. The head constructed of composite skull, steel, and various high quality hardwares; includes 3 HS-645MG ultra-high torque servos. Motions include eyes left/right, jaw open/close, and proportional eyelid open/close. All mechanics is controlled by any PWM servo controller, microcontroller, or simple RC system.
Fritz
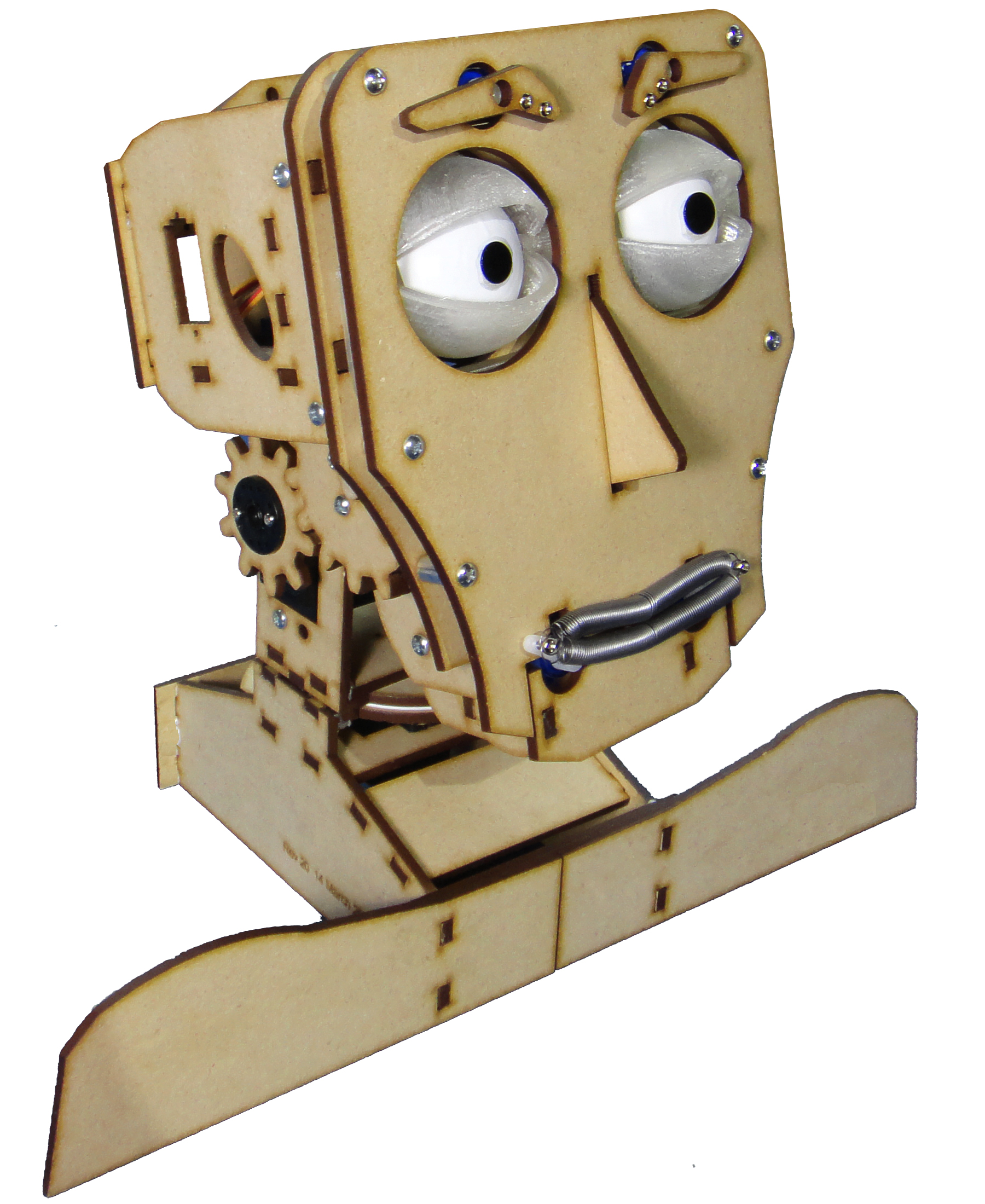
Fritz is a robot head with human like facial features that you can control, much like a puppet or marionette. He has moving eyes and jaw, and (on the advanced version) eyelids, eyebrows, lips and a moving neck joint. Control is easy with the PC app which shows a picture of Fritz's face. Fritz is available in two versions: Basic and Advanced. The Basic version of Fritz has moving eyes and a jaw. His eyes can move in unison, or independently. Advanced Fritz adds more expression by building on the Basic model and adding eyelids, eyebrows, lips and a movable neck joint.
see also press release...
Robot Talkers
Waseda Talker WT-7RII
WT-7RII can reproduce human-like articulation. The robot consist of vocal organ (the 4-DOF vocal cords and 1-DOF lungs) and articulators (the 7-DOF tongue, nasal cavity and 1-DOF soft palate, 5-DOF lips, and 1-DOF jaw). The lip mechanism was constructed mimicking human mechanism, pushing and pulling circularly with 5 link mechanism. Each link and lip were connected with vise mechanism.
Talking Mouth

The talking robot consists of an air pump, artificial vocal cords, a resonance tube, a nasal cavity, and a microphone connected to a sound analyzer, which, respectively, correspond to a lung, vocal cords, a vocal tract, a nasal cavity, and an audition of a human. The resonance tube as a vocal tract is attached to the vocal cords for the modification of resonance characteristics. The nasal cavity is connected to the resonance tube with a sliding valve between them. The sound analyzer plays a role of the auditory system.
read the article there... you also can see some video there...
Head parts, toys, etc.
BotBrain
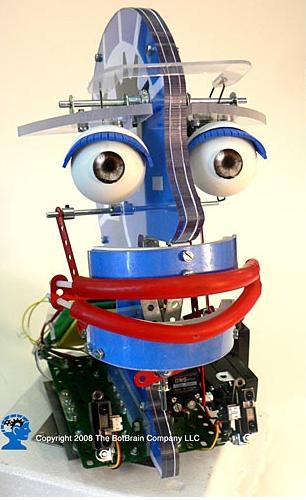
The head features moving eyes and eyelids, a mouth that changes expressions, and sensors that allow the robot to react to changes in the environment.
Mechanical Mouth Kit - M
With this complete kit you can build a mechanical mouth module that will open and closed using the attached micro R/C servo. By connecting the R/C servo to any of the optional control board you can create a fully programmable mouth module with automated control and playback or to the AutoTalk controller if you want to convert sound directly to servo motion control. Kit includes: Micro R/C Servo; Mouth mounting bracket, support and hardware; Mouth movement bracket with mounting hardware; Realistic mouth with teeth and free movement animation tongue; Servo linkage hardware/parts; Assembly guide/application overview.
WHW8040

WHW8040 is fully assembled and is ready to use robot head system. It comes with 5 servos, Camera module, Multimedia Controller, Servo Controller, WiFi Module and WiRobot Software.
Talking Skull Kit
Starter kit to create an animatronics' talking Skull. Kit Includes AutoTalk, Servo, Mechanical linkage kit, Autotalk programming and application guide. Low density poly-urethane foam Head.
Tongue model
This is a human tongue demonstration model to show advantage of Takanishi Laboratory flexible actuators. Four flexible actuators and the automatic parameter exploration algorithm are implemented in it. As a result a tongue motion is very human like.
Industrial Animatronic Neck Mechanism
The Industrial Animatronic Neck Mechanism provide a plug-and-play solution to create life-like motions on a human-sized animatronics android. This is perfect for replacing leaky, messy, and expensive hydraulic systems, for those who are creating new, state of the art animatronics, or those who need a research platform for the Mecha ToMoMi or Mecha Hitsu Gen2 head that will allow realistic, emotive head motion. The neck is constructed of anodized aircraft aluminum, servos use magnetic encoders for years of service. Neck has 5 motions, all coupled to only 3 servos, controlled by any PWM servo controller, microcontroller, or simple RC system.
Dubious, deserted or obscured projects
Intelligent Robotics & Mechatronic System Lab.
А face robot able to express natural humanlike face motions using artificial muscles made of electroactive polymer.
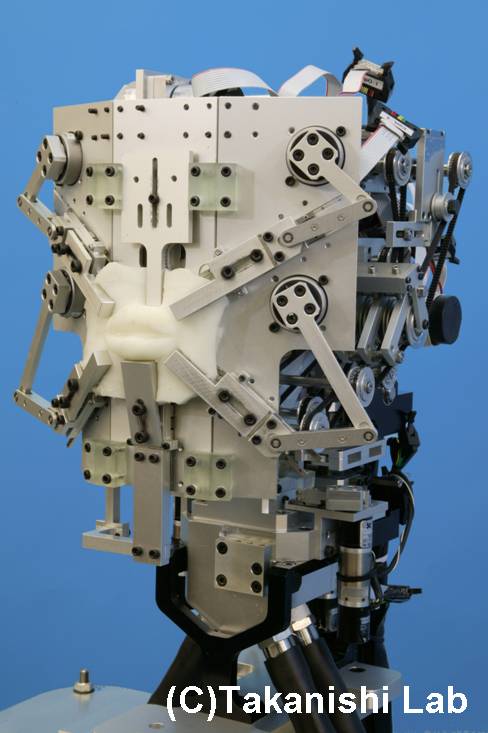
Waseda-Docomo face robot WD-2
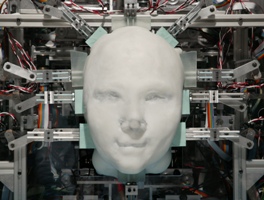
A face robot that expresses various faces by changing a shape of the mask and projecting a face image on the face mask.
Waseda Talking Robot WT-7RII
Humanoid Robotics Institute (HRI), Waseda University
WT-7 consisted of vocal organs (the 4-DOF vocal cords and 1-DOF lungs) and articulators (the 7-DOF tongue, 1-DOF velum, 5-DOF lips, and 1-DOF jaw), and could reproduce human- like articulatory motion; the total DOF was 19.Vocal cords, tongue and face were made of thermoplastic rubber Septon (R). This material is so flexible and stretchable. Vocal cord model was also improved by adding new pitch control mechanism. By adopting a new linkage mechanism, the tongue model could form 3D vocal tract shape more accurately than the previous 2D model.
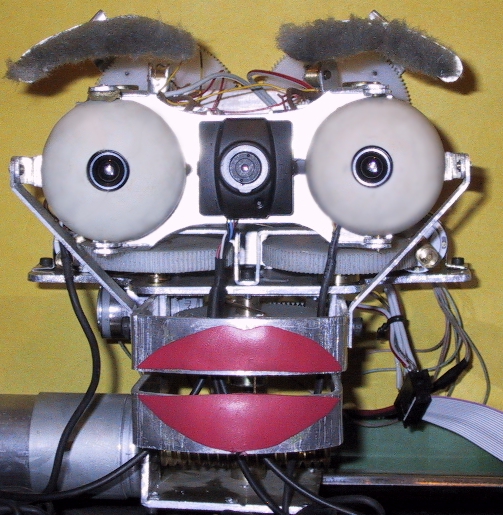
MERTZ
MERTZ is an active vision head robot, designed for exploring scalable learning in a social context. For example, the robot may learn to correlate objects and people with frequently uttered phoneme sequences, differentiate among people and their interaction habits, learn to dislike some people who tend to annoy the robot, etc. MERTZ has recently gone through a series of experiment where it interacted with many people at different public spaces.
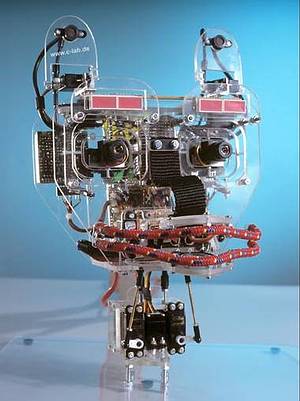
Kim Head
Anthropomorphic robot head intended as a research platform for studying autonomously learning active vision systems. The robot head closely mimics the major degrees of freedom of the human neck/eye apparatus and allows a number of facial expressions. The robot head can shift its direction of gaze at speeds which come close to that of human saccades. Since this one design only makes use of low cost consumer grade components, it paves the way for widespread use of anthropomorphic robot heads in science, education, health-care, and entertainment.
iCub
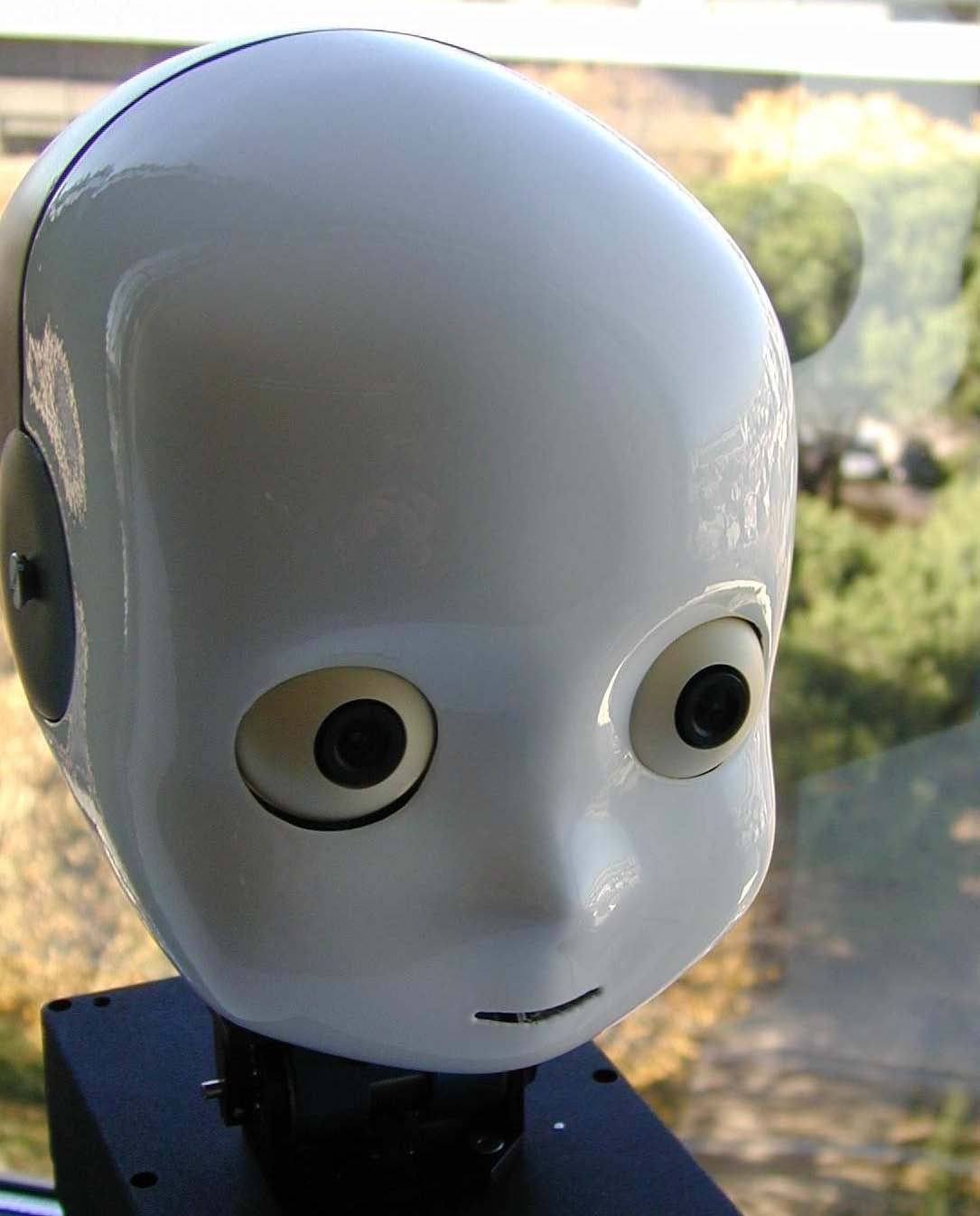
iCub is the most complete humanoid robot currently being designed, in terms of kinematic complexity. The eyes can also move, as opposed to similarly sized humanoid platforms.
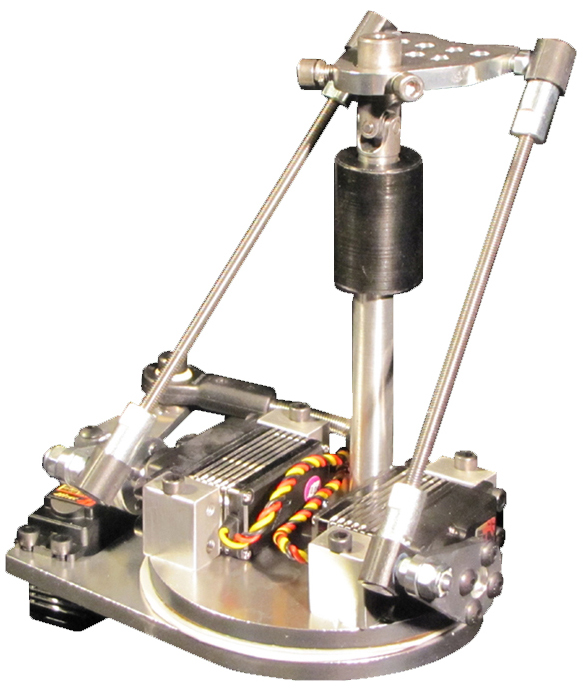
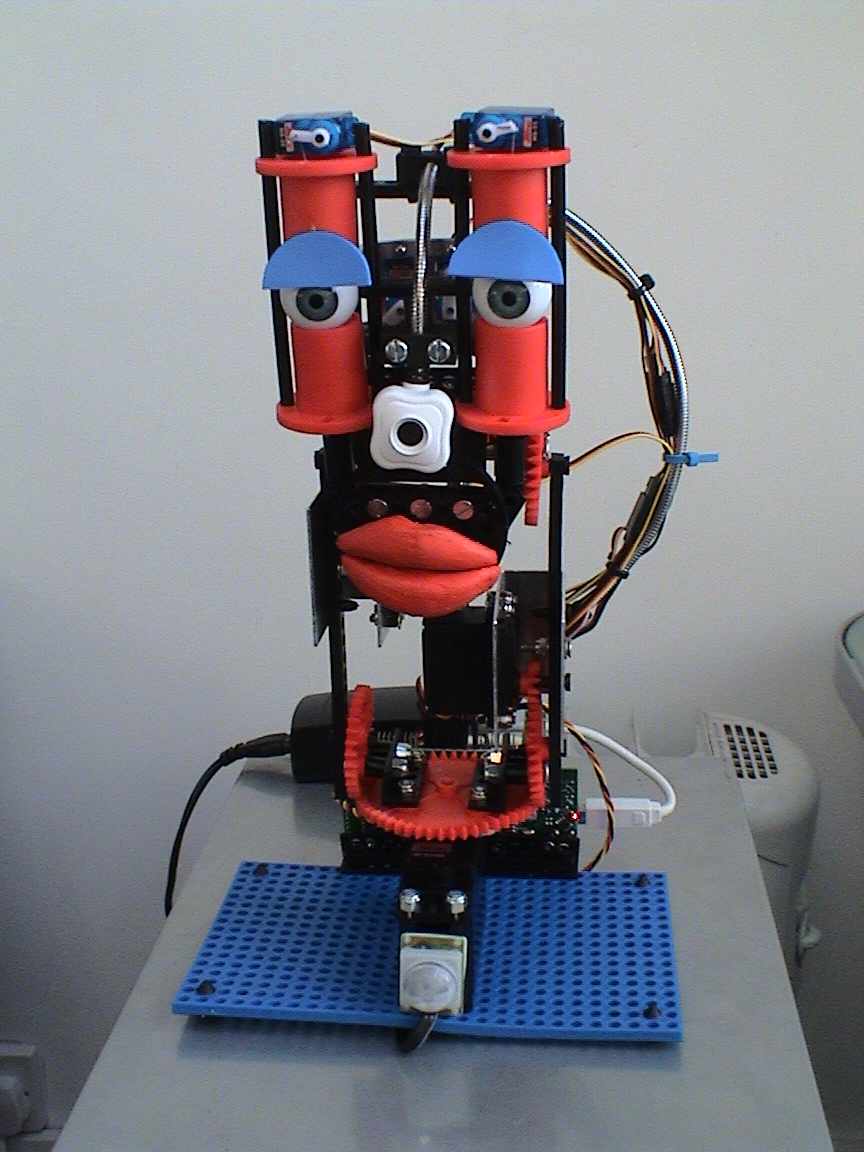
MAVERIC

It has 7 DOFs - pan and tilt in each eye and head rotate, nod and tilt - and is controlled using a real time operating system (vxWorks). MAVERic is equipped with multiple sensory modalities including position sensing (7DOFs), load sensing (3DOFs), stereo microphones, foveal and peripheral vision in each eye and a 6-axes gyroscope in addition to laser range finders in each eye.
ARYAN
The face is comprised of eight degrees of freedom. Its controllable features are eyes, eyebrows, jaw and neck. Aryan's brain runs on a standard PC with 200MHz Intel Pentium Processor under RedHat Linux. Software and the face are connected through two home-built electronic boards, motor controller and driver.
iCat

The robot is 38 cm tall and is equipped with 13 servos that control different parts of the face, such as the eyebrows, eyes, eyelids, mouth and head position. With this setup iCat can generate many different facial expressions - happy, surprise, angry, sad - that are needed to create social human-robot interaction dialogues.
Plastic Inkha
Inkha has been installed as a permanent working robotic receptionist in the strand entrance of king's college London, strand, London wc2r 2ls, uk since 3rd December 2003 the reception area is open to all Monday to Friday 9am to 5pm nearest tubes are temple, Covent garden and embankment
Chimp
Realistic animal behavior; Mood dependent behavior: responds to stimuli with mood specific animations and sounds; Infrared vision system: detects movement, tracks objects and reacts to human interaction; Touch sensors in his chin, head and ears; Stereo sound sensors detect loud sounds; Remote control or autonomous interactivity; Visual and sonic guard mode; Program mode; Sleep mode
MEXI
MEXI has 15 degrees of freedom for presenting different emotions like happiness, anger or fear by corresponding facial expressions generated by movements of its mouth, ears, eyes and neck. Furthermore, a loudspeaker is integrated in its mouth for talking to its observer in natural language. To draw conclusions about the observer's mood, MEXI analyzes his or her facial expression and natural-language utterances for certain keywords and for the sentence melody.
Fritz

Humanoid robot Fritz is 120cm tall and has a total weight of about 6.5kg. Its body has 16 degrees of freedom (DOF): Each leg is driven by five large digitally controlled Tonegawa PS-050 servos and each arm is driven by three digital Futaba S9152 servos. For the use as communication robot, Fritz equipped with a 16DOF head, mounted on a 3DOF neck. The eyes are USB cameras that can be moved together in pitch and independently in yaw direction. Six servo motors animate the mouth and four servos animate the eyebrows. The servo motors are controlled by a total of four ChipS12 microcontroller boards, which are connected via RS- 232 to a standard PC as main computer. It runs computer vision, speech recognition/synthesis, and behavior control.