The best five anthropomorphic robotic hands/arms
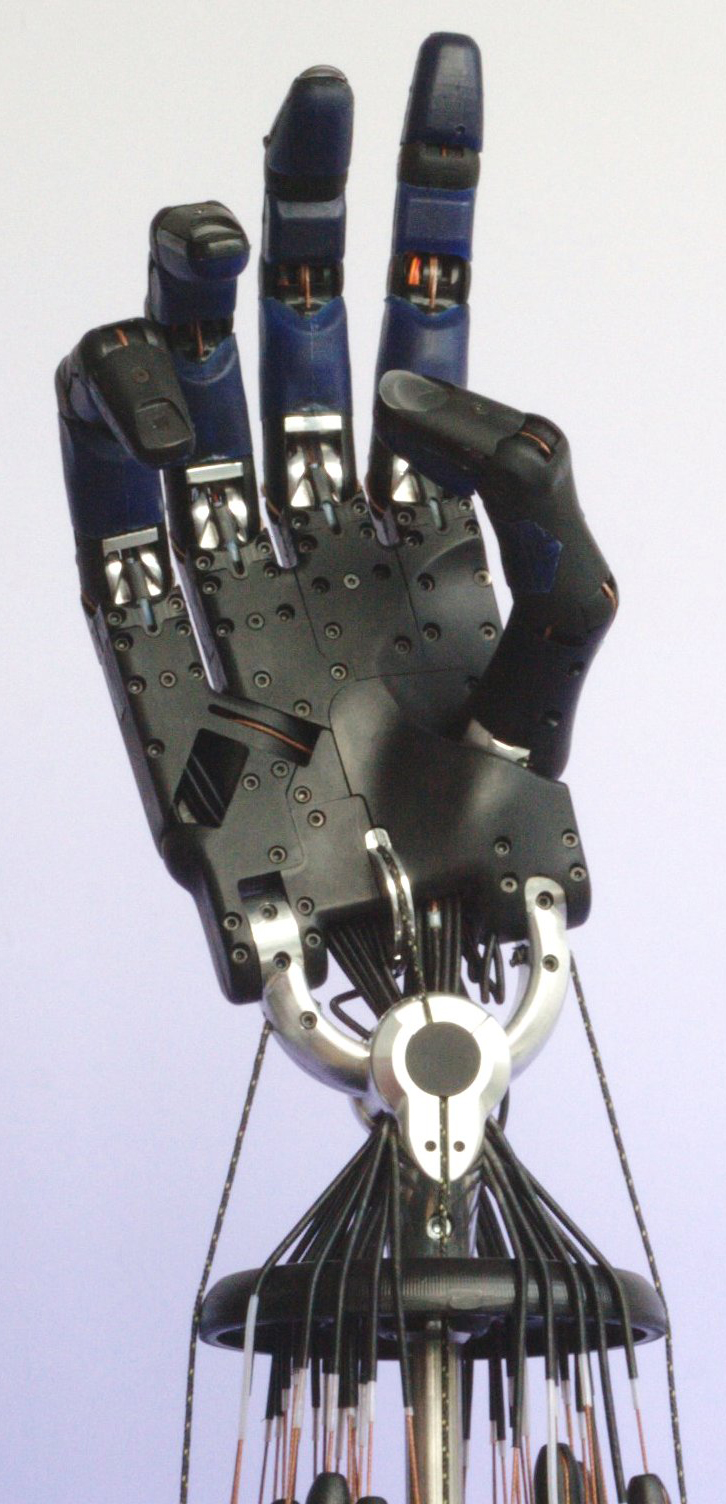
Smart Motor Hand (C6M)

Model Smart Motor Hand (C6M) uses Shadow's electric Smart Motor actuation system, rather than the pneumatic Air Muscle actuation system of other Dextrous Hand systems. The Hand is driven by 20 Smart Motor units mounted below the wrist which provide compliant movements. Following the biologically-inspired design principle, a pair of tendons couple each Smart Motor to the corresponding joint of the Hand. Integrated electronics in the Smart Motor unit drives a high efficiency rare-earth motor,and also manages corresponding tendon force sensors. The Hand system (hand, sensors, and all motors) has a total weight of 4 kg.
see the last specs (also 2012 specs... and older specs...)
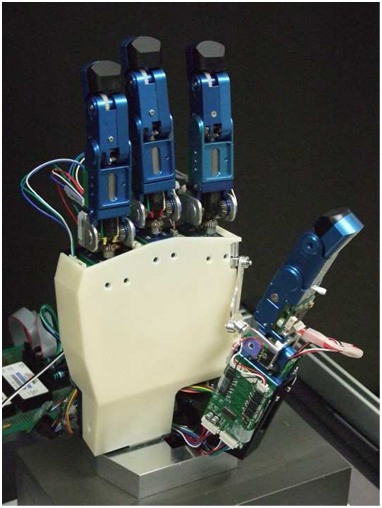
EH1 Milano Hand

The EH1 Milano Hand is a programmable anthropomorphic human-sized hand able to grasp a variety of objects and to sense them through multiple force and position sensors. Modular actuation units are placed in flanges customized for the application, and cable transmission allows for remote actuation, thus enabling the employment of low payload robotic arms. The hand alone weighs just 250g. Each actuator contains a CPU, firmware, sensor acquisition electronics, communication electronics, servo-controllers, and one brushed DC motor. The hand communicates through RS232 or USB and is ready to be easily integrated with your application within multiple research scenarios ranging from prosthetics, neuroscience, human-robot interaction, rehabilitation, etc.. The EH1 Milano series firmware routines allow to perform grasps automatically, by just sending a single byte from your application. Alternatively advanced users may implement completely customized control schemes, taking advantage of the embedded 1 kHz servo-control loops.
Actuated Sheffield Hand

Elumotion Ltd. manufactured a replica of the Sheffield Hand for Orebro University and subsequently devised an actuation strategy for 12 degrees of freedom of this hand. Following from the findings of the development of the Sheffield Hand, the actuation components were designed in modules. Each module to power the flexion and extension of the finger comprises telescopic rods, complete with a series elastic element. The rods pull on tendons to the fingers, in a similar manner to how the real hand works. A second smaller module, based on a similar principle, moves the fingers from side to side and is situated in the space of the hand. Work on this hand is ongoing.
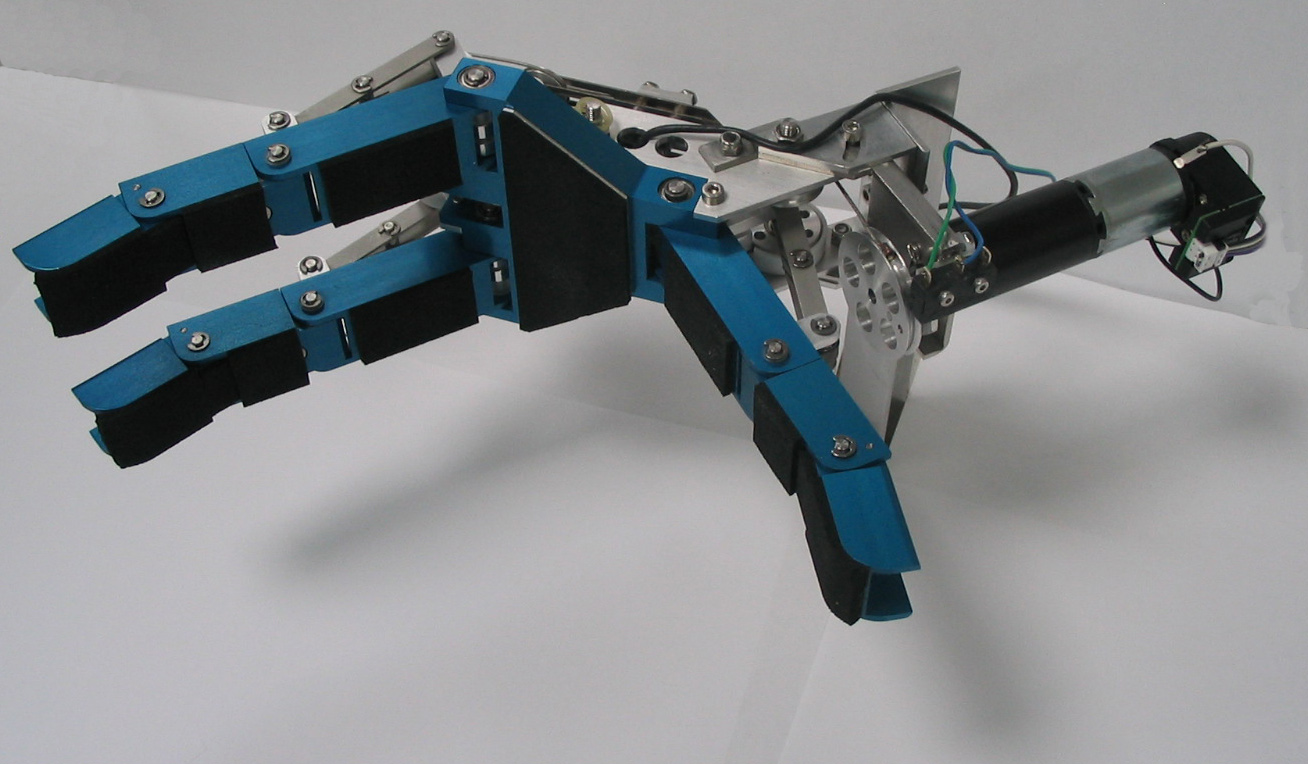
Elu-2 Hand

The Elu2-Hand is a human-scale anthropomorphic robot hand able to approximate real hand movements at humanlike speeds. The Elu2-Hand has 9 DOFs that are servo actuated within the hands volume. Whilst originally designed to fit onto the Elu2-Arm the compact Elu2-Hand design means it may be fitted onto many different robot arms. The Elu2-Hand hand has large soft pad areas that aid the hand manipulate objects and provide the potential for tactile sensing. Each degree of freedom has the potential for ultra reliable non-contact absolute sensing and limit switches providing extra positioning redundancy for safety critical applications.
see datasheet... for selling: sales@elumotion.com
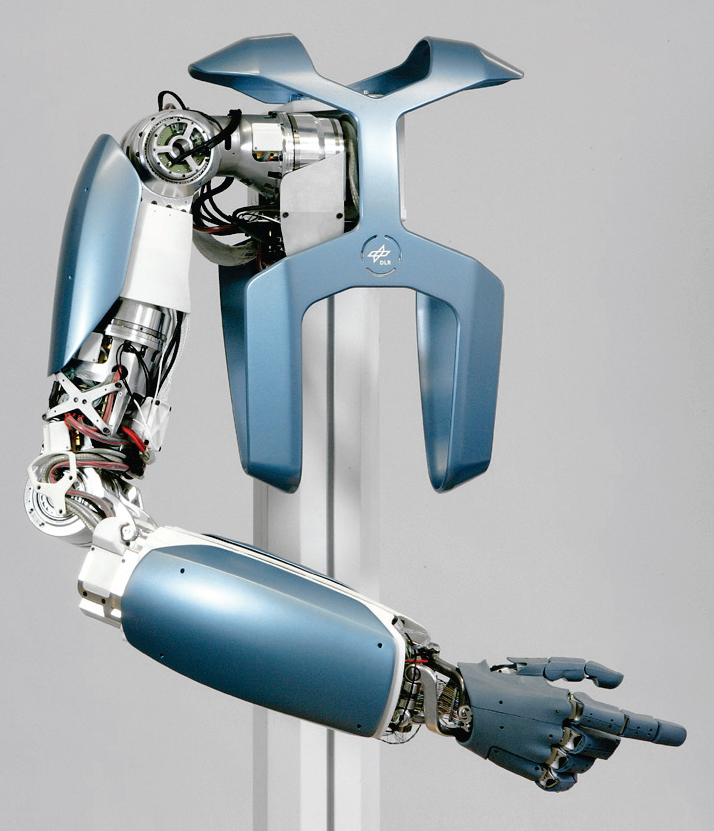
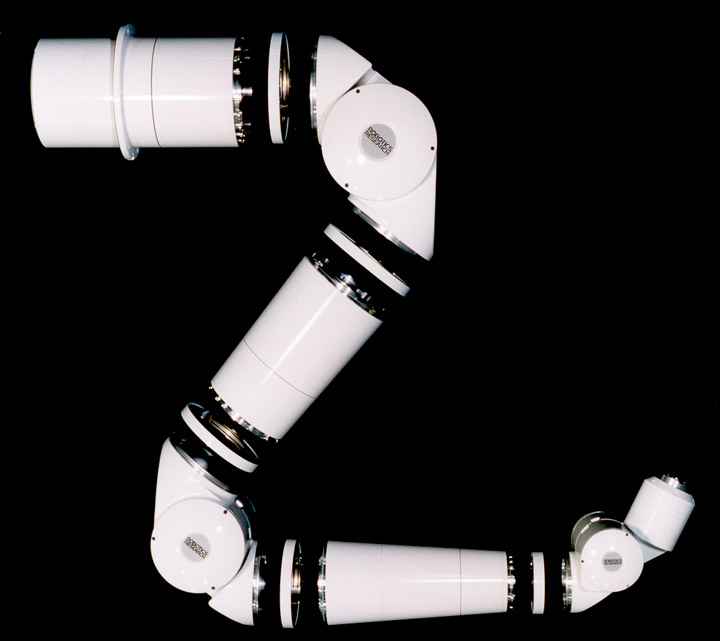
DLR Light Weight Robot(LWR)
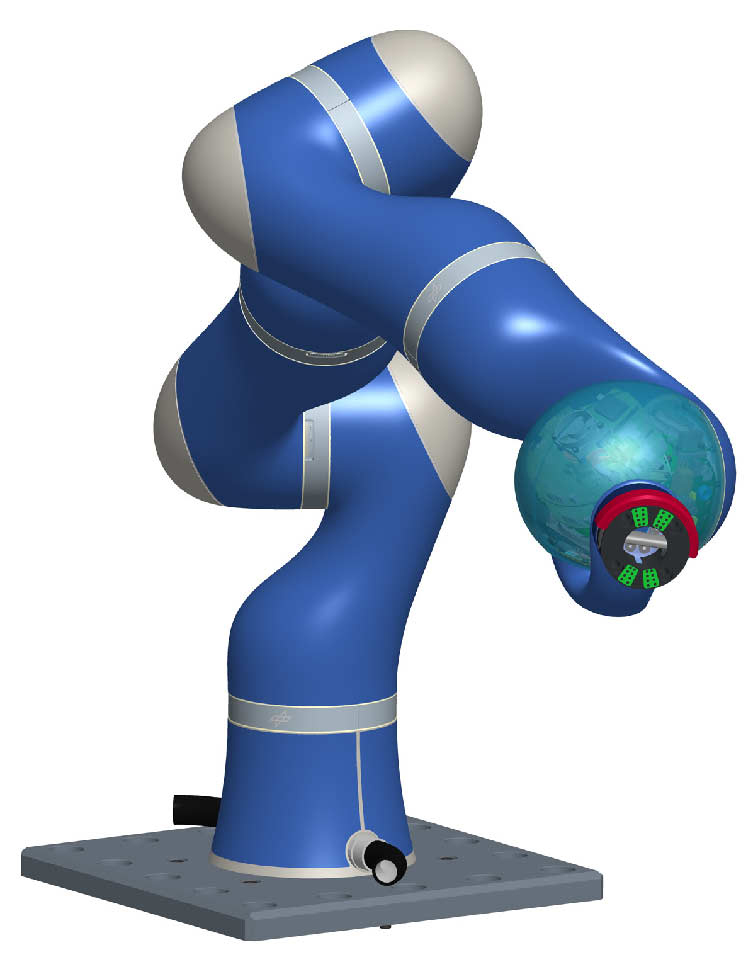
The Institute of Robotics and Mechatronics
The DLR Light Weight Robot (LWR) is a light-weight, flexible, revolute joint robot, which by its overall sensoric equipment is especially dedicated for work in the sensitive area of human interaction. The arm kinematics, size, power and manipulation capabilities are fairly similar to that of a human arm. The arm can be connected to any gripper or tool by a standard robot interface flange, which can also be operated over internal supply lines. The complete electronics, including the power converters, is integrated in the arm. Each joint is equipped with a motor position sensor, a joint position sensor and a joint torque sensor. The advanced control algorithms enable vibration-free and high-dynamic movements. In this context the first roll-pitch-roll combination can be seen as shoulder and upper arm, followed by pitch-roll for the elbow and forearm and concluded by a pitch-pitch combination with kardanic as a wrist. Total weight of the arm is 14 kg, maximum payload 14 kg .
Advanced Hands/Arms
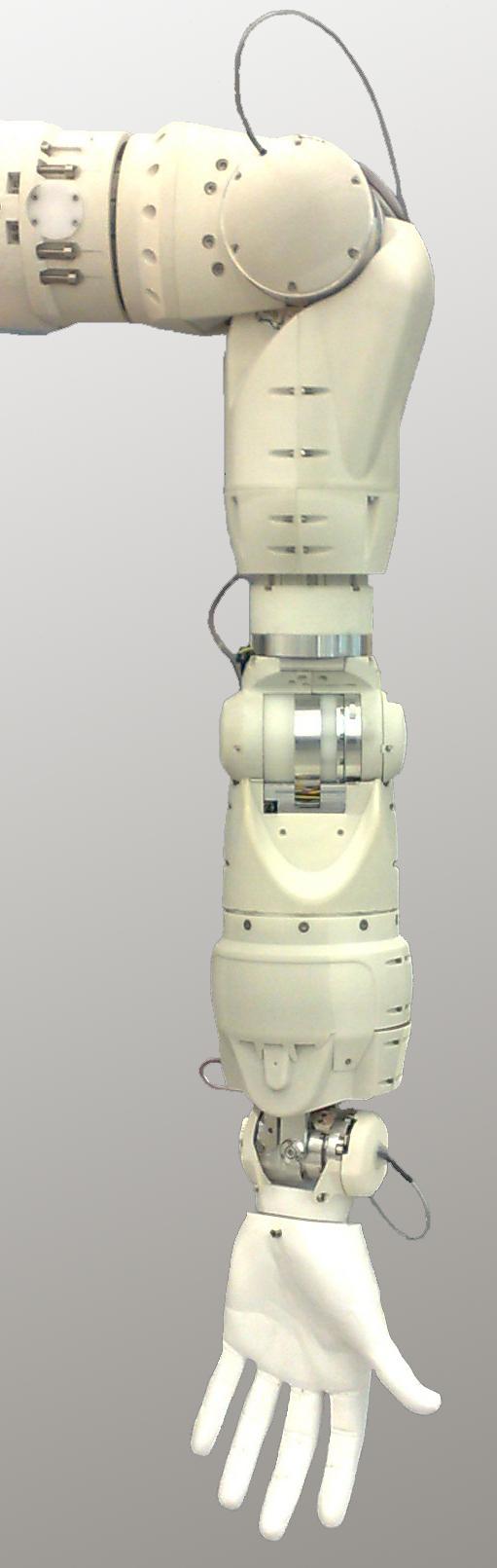
Robonaut Arm

Robonaut's arms are human scale manipulators designed to fit within the exterior volume of an Astronaut's suit (the EMU). The endoskeleton design of the arm, houses thermal vacuum rated motors, harmonic drives, fail safe brakes and 16 sensors in each joint. Custom lubricants, strain gages, encoders and absolute angular position sensors are being developed in house to make the dense packaging possible for these advanced actuators.
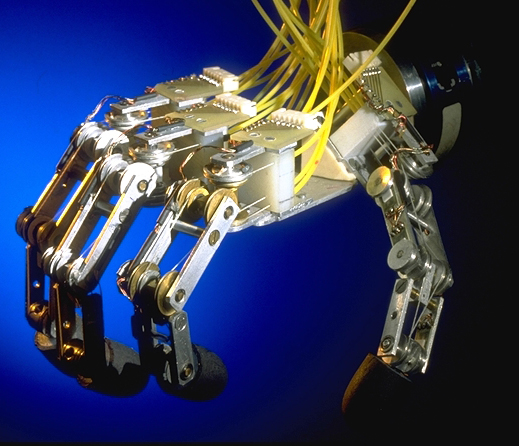
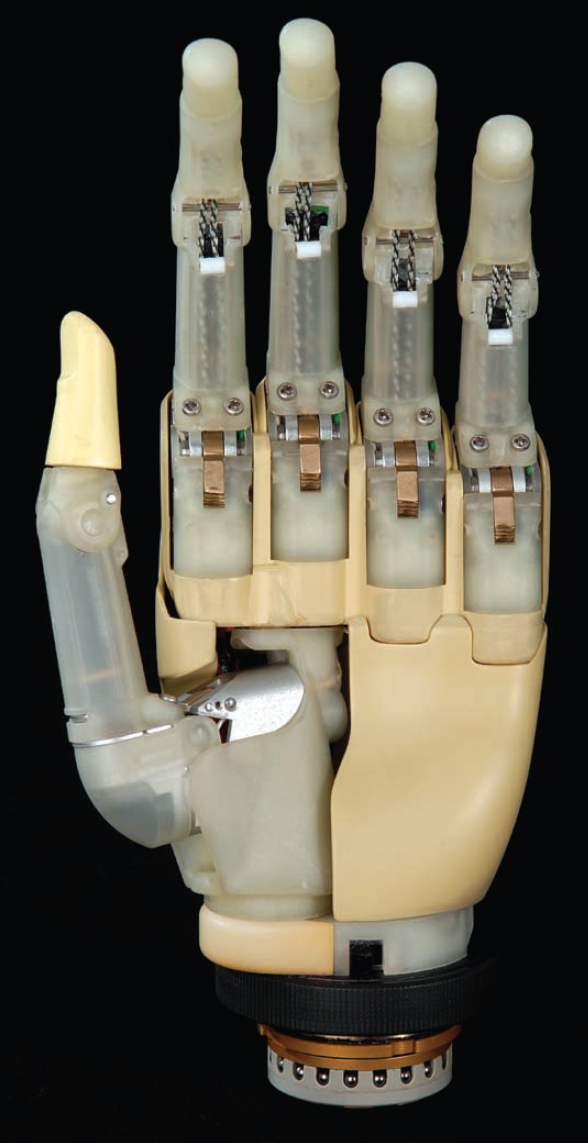
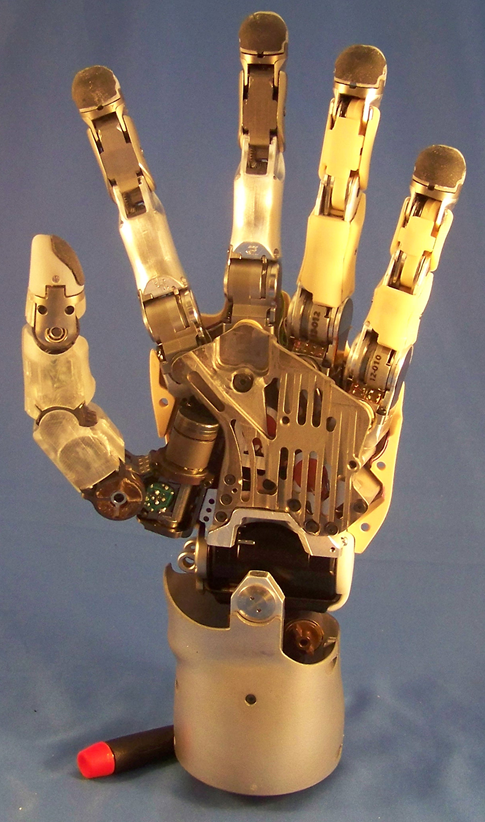
Robonaut Hand

Each hand has a total of 14 degrees of freedom. It consists of a forearm which houses the motors and drive electronics, a 2 degree of freedom wrist, and a 5 finger, 12 degree of freedom hand. The forearm, which measures 4 inches in diameter at its base and is approximately 8 inches long, houses all 14 motors, 12 separate circuit boards, and all of the wiring for the hand.
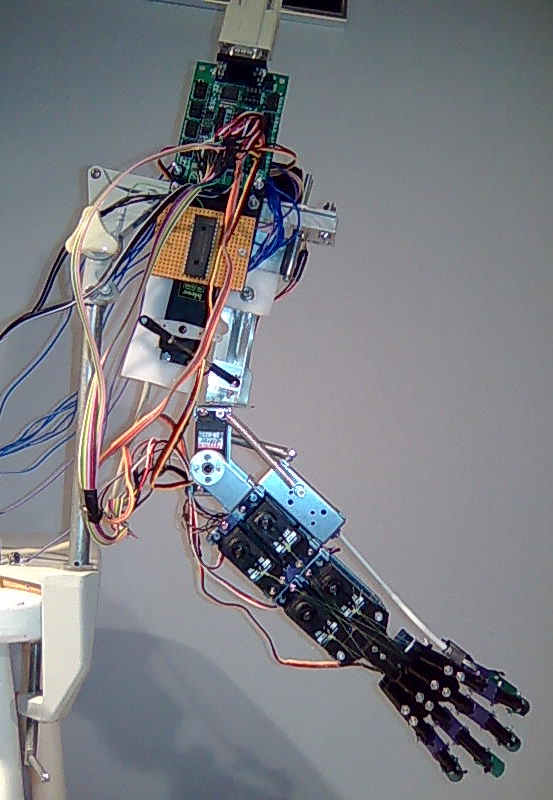
Dexhand
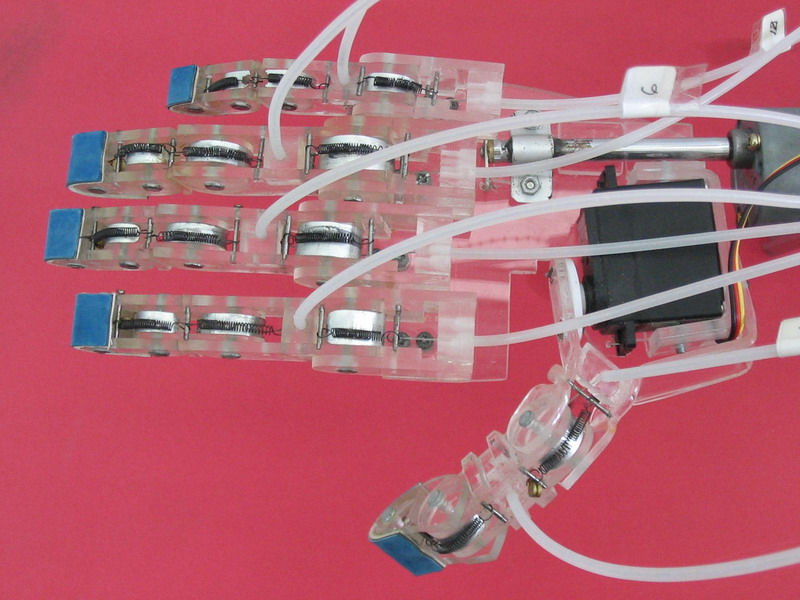
The dimensions of the fingers are close to that of a human one. Each joint has a range of rotation which equivalent to that of a human hand. Each finger joint use steel wire to drive the fingers for grasp and use a tension spring for go back to normal position. Each finger have 2 DOF that is MP (Metacarpal Phalangeal) joint and PIP (Proximal Inter Phalangeal)joint. The DIP (Distal Inter Phalangeal) joint is passively driven follow PIP joint. Each Finger is actuated through 2 steel wire and driven by 2 RC Standard Servos. First steel wire driving the MP joint and other steel wire for PIP and DIP joint. The RC servo have output torque of about 3.7 KgCm (51 OzIn) at 6.0 Volt.
Touch EMAS Arm
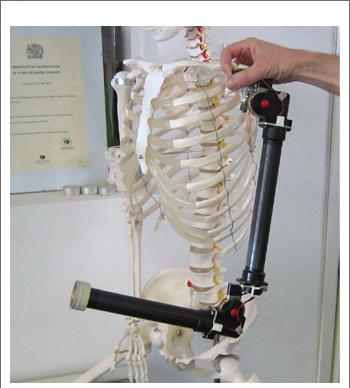
The arm comprises powerful motors within the structural limb sections. This endoskeletal approach enables realistic coverings to be put onto the arm to make it appear life-like. The arm shown has two active degrees of freedom, one for the flexion and extension of the elbow, and a similar articulation for the shoulder.
Lara Hand

The hand consists 5 fingers and a wrist, that are actuated by in total 7 SMA actuators and several springs. The hand consists of all bones of the human hand, but has only 17 joints at the moment. Therefore the every finger (except the thumb) can perform a linear contration. In future, this will be advanced so that the fingers can straddle to rise the variety of object sizes. The thumb is actuated by two actuators, one to contract the thumb and one to generate a horizontal movement to position the thumb to the objects.
Yokoi Hand

Robotic hand inspired by the muscle tendon system of the human hand. The robotic hand has 13 degrees of freedom, and each finger has been equipped with different types of sensors (flex/bend, angle, and pressure). The same robotic hand has been used as a prosthetic device. EMG signals can be used to interface the robot hand non-invasively to a patient and electrical stimulation can be used as a substitute for tactile feedback.
Delft Hand
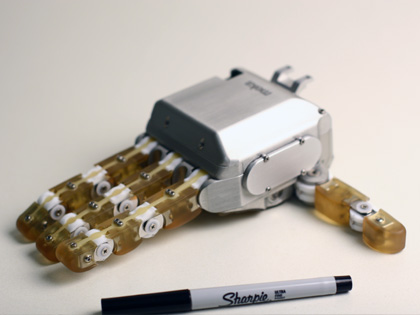
Delft hand is a powerful, versatile, lightweight three-fingered underactuated gripper. The three fingers of the hands each have two degrees of freedom, all actuated by a single motor. Clever mechanisms assure a powerful and robust grip on widely varying objects with a minimum of sensing and control. Characteristics: 3 x 2 degrees of freedom; 1 low-power motor; 1 force sensor; 0.6 kg total mass; 8 kg maximum payload
Delft Arm
Delft arm is a low-power and safe manipulator and has a low mass and uses low-power motors. The design is based on the principle of static balancing, whereby adjustable springs compensate for the mass of the arm. Another example of this principle at work is found in a classic desk lamp. Characteristics: masses are fully balanced using adjustable springs; 4 degrees of freedom; 4 low-power motors; 4 rotary encoders; 10 kg total mass; 2 kg maximum payload
H2 Hand
The Meka H2 Compliant Hand is a fully-contained five degree-of-freedom humanoid hand. It has a total of 12 DOF controlled by 5 actuators. This also allows each finger to automatically adapt its shape to an object, thereby increasing the grasp contact area and stability.
Harada Hand

The Harada hand has four fingers and a thumb built to approximate dimensions of the human hand. Each of the four fingers has three links and three revolute joints to pitch the finger forward out of the plane of the palm. The thumb has two links with two revolute joints. All motors and gearing are located within the rigid palm. They are controlled through a computer interface which takes TTL level inputs representing commands for finger contraction and extension, and converts them to drive signals for each motor. Control inputs can also be generated from muscle activity recorded with EMG electrodes placed on a human forearm, and processed by a custom pattern recognition circuit built into the robot forearm cavity.
RAPHaEL Hand

RAPHaEL (Robotic-Air Powered Hand with Elastic Ligaments) is a humanoid robotic hand that utilizes corrugated tube actuation with compressed air. Unlike electromechanically actuated hands, thanks to the natural compliance, RAPHaEL can mimic the grasping capability of a human hand more accurately. By changing the pressure of the compressed air, the amount of applied force can also be controlled.
MechaTE Hand

The MechaTE hand was developed to provide a robust mechanical hand platform for any number of applications. The design allows for the programmer to animate this hand quickly (only 5 servos to manage) while giving optimal realistic motion through 14 joints. The sensitivity of the finger compliance can be adjusted by the user. A standardized § wrist socket at the back of this hand allows for easy connection to an existing robotic figure.
DART Hand
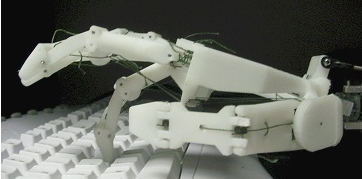
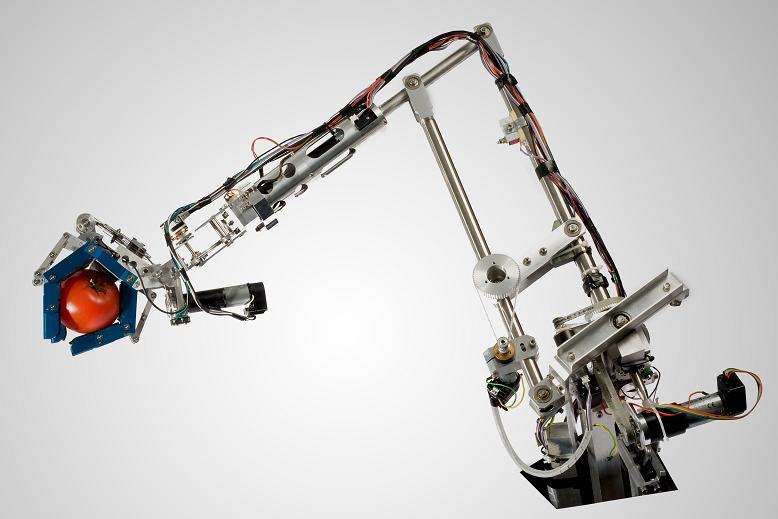
The dexterous anthropomorphic robotic typing hand (DART) was developed by a team at Virginia Tech. The hand is optimized to be near-human in appearance and performance and capable of many precision tasks, but the team concentrated its biomimetic design on the ability to use a computer keyboard. The DART hand encompassed a total of 19 motors and achieved 19 degrees of freedom. The hand can be controlled by input text, which comes from either a keyboard or a voice recognition program. When typing, a finger receives a command to position itself above the correct letter on the keyboard.
MAC-HAND
MAC-HAND is a four fingered anthropomorphic robot hand. Each finger has three DOFs and is actuated by four independent tendons driven by DC motors. The four fingers are identical, and consist of two phalanges. Each finger is independently actuated by four motors. The control is performed by four microcontrollers, one for each finger, Finally the coordinated control of the hand is demanded to a supervision computer connected through a CAN bus link.
Dextrous Hand (C5M)
Finger length from tip of finger to middle of knuckle 100mm; Thumb length 102mm; Palm length from middle knuckle to wrist axis 99mm; Palm thickness 22mm; Palm width 84mm; Thumb base thickness 34mm; Forearm base to wrist axis 434mm; Weight The Hand, sensors, muscles and valve manifold have a combined weight of 3.9 kg.
see more... and last specs
here...
Ng Hand

4 fingers - 1 DOF each (1 servo - open/close ), 1 thumb - 2 DOF (2 servos - open/close & side to side), Fingers - 1 DOF (1 servo - spreading/closing ), Wrist - 1 DOF (1 servo - rotation), Forearm - 1 DOF (1 servo - rotation), Elbow - 1 DOF (1 servo - bend/straighten), Upper arm - 1 DOF (1 servo - rotation), Shoulder - 2 DOF (2 servos - raise/lower arm & swing forward/back), Kit includes 2 Mini-SSC servo controllers.
$6000
BIONIC HAND

The Bionic Hand has an endo-skeletal structure and obtains cutaneous sense from a modified version of the artificial sensitive skin. The hand has 16 DOFs with the distal and proximal interphalangeal joints actuated with the same actuators. The underactuated digits adapt to object shape by bending the joints from the proximal until the phalanges hit the object. The digits are aligned with the corpus plate so that the fingertips will come together when the hand is closed. The hand is driven by 22 pneumatic actuators attached antagonistically.
OpenArm v.2.0

The OpenArm v.2.0 is a low-cost, 7-degree-of-freedom robotic arm. The arm is made from lasercut plywood, and is powered by four stepper motors in the base and three small dynamixel servo motors in the lower arm. It is series-elastic so it is compliant if you push on it. This is done via rubber tubes that get squished between two plates. The arm is also human-safe because it is pretty light, in addition to the compliance. The teleoperation control scheme is done using a shirt with sensors in it (accelerometers and magnetometers) that detect the wearer's pose. The computer the solves for the location of the wearer's hand, and inverse kinematics are used to get the robot's gripper to track that location. The robot is running the Robot Operating System (ROS).
see article...
$5000
Sheffield Hand

The Sheffield Hand is an articulated model of the human upper-limb. It was researched and developed at Sheffield Hallam University. The aim of the project was to elicit knowledge on appropriate mechanical articulations that would permit life-like movement of a replica of the human arm. In addition to adding to knowledge, this project resulted in several tangible models.
Gifu Hand III

Gifu hand form is approximate for the human hand to not only size but also motor function like geometrically in order to realize grasp and operation of the object by changing human. The index is 5, and joint number and degree of freedom equal to the human finger joint have been established. The thumb has 4 degrees of freedom 4 joints.
see more... for purchasing visit Alibaba.com Hong Kong
SKKU Hand III
This anthropomorphic robot hand has 13 DOFs and 840 g weight. The thumb is designed as one part of the palm and provides the mobility of the palm. The driving circuits are embedded in the hand, and each driving circuit communicates with others using CAN protocol. The SKKU HAND III is manufactured and feasibility of the hand is validates through preliminary experiments.
IH1 Azzurra Hand

The IH1 Azzurra Hand is a human-sized programmable anthropomorphic hand able to grasp a variety of objects and to sense them through multiple force and position sensors. The hand is totally self-contained, and weighing less than 600g. It contains a CPU, firmware, sensor acquisition electronics, communication electronics, servo-controllers, and 4 brushed DC motors. Communicating through a standard interface (RS232 or USB), the hand is ready to be easily integrated with your application within multiple research scenarios ranging from prosthetics, neuroscience, human-robot interaction, rehabilitation, etc.. The IH1 Azzurra firmware routines allow to perform grasps automatically, by just sending a single byte from your application. Alternatively advanced users may implement completely customized control schemes, taking advantage of the embedded 1 kHz servo-control loops.
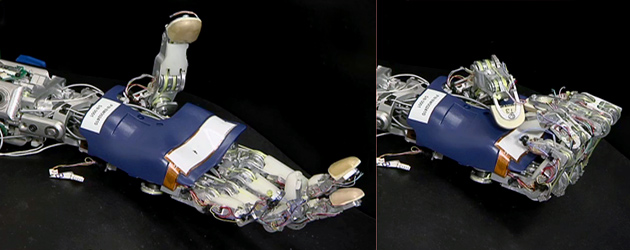
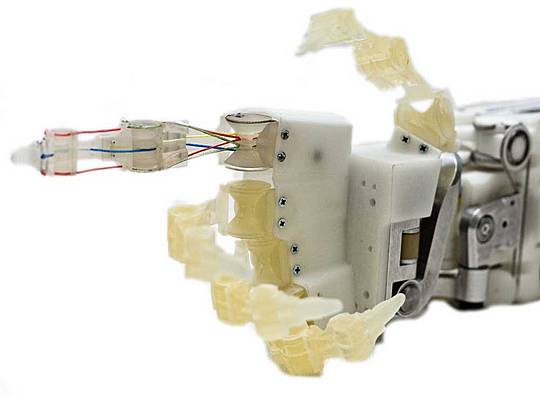
Hand-Arm System
The hand is roughly the same size as an adults, its five fingers attached to 38 wires made of Dyneema (a super strong synthetic fiber), and individually actuated by motors hidden in the forearm. All those tendons equate to 19 degrees of freedom, closely matching a real human hand, and their stiffness can be relaxed and intensified to absorb impacts. This highly integrated mechatronic system consists of 52 drives and more than 100 sensors.
Elu-2 Arm
The Elu2-Arm is a human-scale anthropomorphic robot arm that simulates the movement and speed of a human arm. The arm has been specifically designed to support experiments investigating human-robot cooperation. Humanlike form and movement are important whilst data from the sensors within the arm may provide the researcher rich information about the dynamics of interaction. The arm has 7 DOFs actuated using powerful servo-motors and drive electronics, along with torque and absolute position sensors that are all situated compactly within the arms volume. Each arm is wired with a single CAN bus for operation of the joints and to monitor the sensors. The Elu2-Arm is designed to work with the Elu2-Hand, however, the arm has been fitted with novel end-effectors, such as novel sensors, custom grippers or surveillance equipment. Due to its versatility the hand may be used in many applications ranging from teleoperation to promotion and entertainment.
see datasheet... for selling: sales@elumotion.com
Modular robotic arm

The new modular robotic arms include modular servo-actuators. These actuators are composed of a motor-gearbox, a power stage and a controller, so the resulting arm does not need an external control unit. Thus, the communications between the arm and the external environment are reduced to the minimum wires: 2 for CAN bus and 2 for power. The arm can be adjusted to the needed application requirements, so it is possible to choose a conventional arm or to redesign the joining elements to fulfill the specific application needs. This type of arm integrates the power and control stages and is the most suitable for installations over mobile platforms or androids.
Kinova Jaco Arm

Jaco Arm enables users to interact with their environment with complete safety, freedom, and effectiveness. The arm moves smoothly and silently around 6 degrees of freedom with unlimited rotation on each axis. The axes are aluminum compact actuator discs (CADs) of a unique design. Each arm consists of 2 distinct sets of 3 identical, interchangeable, and easy-to-replace CADs linked together by a zero insertion force cable. Its main structure, entirely made of carbon fibre, delivers optimal robustness and durability as well as a cutting-edge look-and-feel. The arm is mounted on a standard aluminum extruded support structure that can be affixed to almost any surface.
ADAPTIVE GRIPPER

Adaptive Gripper is developed by Quebec company Robotiq. It is a very interesting robotic gripper that can adapt to various types of objects. The gripper has 3 articulated fingers and 4 grasping modes to pick a wide variety of sizes and shapes, send simple open-close commands and let the gripper adapts to any geometry, control the closing speed, force, do partial closing / opening, receive grip detection feedback from the gripper. Embedded gripper controller communicating with the robot controller over Ethernet/IP, Modbus RTU, DeviceNet or EtherCAT. The gripper comes with the mechanical mount for any robot, and equipped with two connectors on the side for 24V power supply and communication.
see more data sheet... and brochure...
K-1207i
The K-1207i is a 7-axis, kinematically-redundant manipulator. It is a lightest electric-drive articulated robot arms available for a given reach and payload. K-1207i model offering a 50 inch reach and a 35lb. continuous-duty payload, weighs only 155lbs. The useable payload capacity increases considerably as the payload is manipulated closer to the 'heart' of the work envelope or when leverage and torque distribution algorithms are employed.
DIST-Hand
The DIST-Hand is a 4 fingered mechanism with 16 degrees of freedom (4 DOFs on finger) and with a high degree of dexterity. It is a small and lightweight dexterous gripper with anthropomorphic kinematics, which could be easily installed even on small robot manipulators. Each joint has a range of rotation larger than 90 deg, and equivalent to that of a human hand; each finger is actuated through 6 polyester tendons, routed through pulleys and driven by 5 DC motors. To implement servo loops around the perturbations due to the elasticity and in part to friction, on each joint mounted hoc rotation sensors. General weigh of the hand less than 1 kg.
see also: general description... and control system ...
Sandia Hand
(2012)

The Sandia Hand has 13 DOFs (!!) and is modular: the different types of fingers can be attached with magnets and quickly plugged into the hand frame. The operator can quickly and easily attach additional fingers or other tools, such as flashlights, screwdrivers or cameras. Modularity also gives the Sandia Hand a unique durability. The fingers are designed to fall off should the operator accidentally run the hand into a wall or another object. The robots tough outer skin covers a gel-like layer to mimic human tissue, giving the Sandia Hand the additional advantage of securely grabbing and manipulating objects. The Sandia Hand project is funded by the Defense Advanced Research Projects Agency.
OCU-Hand
The anthropomorphic robot hand called OCU-Hand (Osaka-City-University-Hand) has the human-like size, weight and performance with the prime objective of grasping different shapes firmly. The hand is composed of five fingers with total 15 DOFs. In addition, 3 DOF are given for a dexterous designed wrist. All the joints of the OCU-Hand are driven by servomotors built into the fingers. The thumb finger in our proposed hand has a special design that improves the implementation of the hand, and the palm has a unique design so as to improve the hand grasping and handling of different shape objects. Distributed tactile and force sensors are appended to the OCU-Hand as a feedback system in order to grasp an object firmly. A master light-weight glove is to be used to drive the OCU-Hand as a slave.
MiyazakiLab Hand

The robot hands need to be both safe and flexible and a pneumatic actuator is appropriate because it is lightweight and has natural compliance. A pneumatic actuator is an artificial muscle which generates axial tension from air pressure. They are light-weighted and their properties are analogous to skeletal muscle. The research focuses on a control method for a human-sized robot hand using low-pressure driven pneumatic actuators. This actuators are compact, light-weighted and low-pressure driven compared to conventional ones so that they can be embedded in the human-sized robot hand. This hand mimics appearance of a human hand and musculoskeletal structure, which has antagonistic muscle pairs for each joint. The biologically-inspired control method based on the coordination of a agonist-antagonist muscle pair.
Handroid Hand

The Handroid hand is a remotely-operable five-finger movable robot hand. It can be used in engineering environments which are inaccessible or dangerous to human hands. The Handroid hand is a lightweight and cheap device. ITK applied metals used in aircraft parts, which made the Handroid lightweight, durable and has fluid motion. A glove-type controller remotely controls the Handroid by mimicking the operators hand movements. Furthermore, it is under development to be applied as a prosthetic hand, controllable by myoelectric, brain waves, and cerebral nerves.
Prosthetic hands/arms
MLR Hand
(2012)

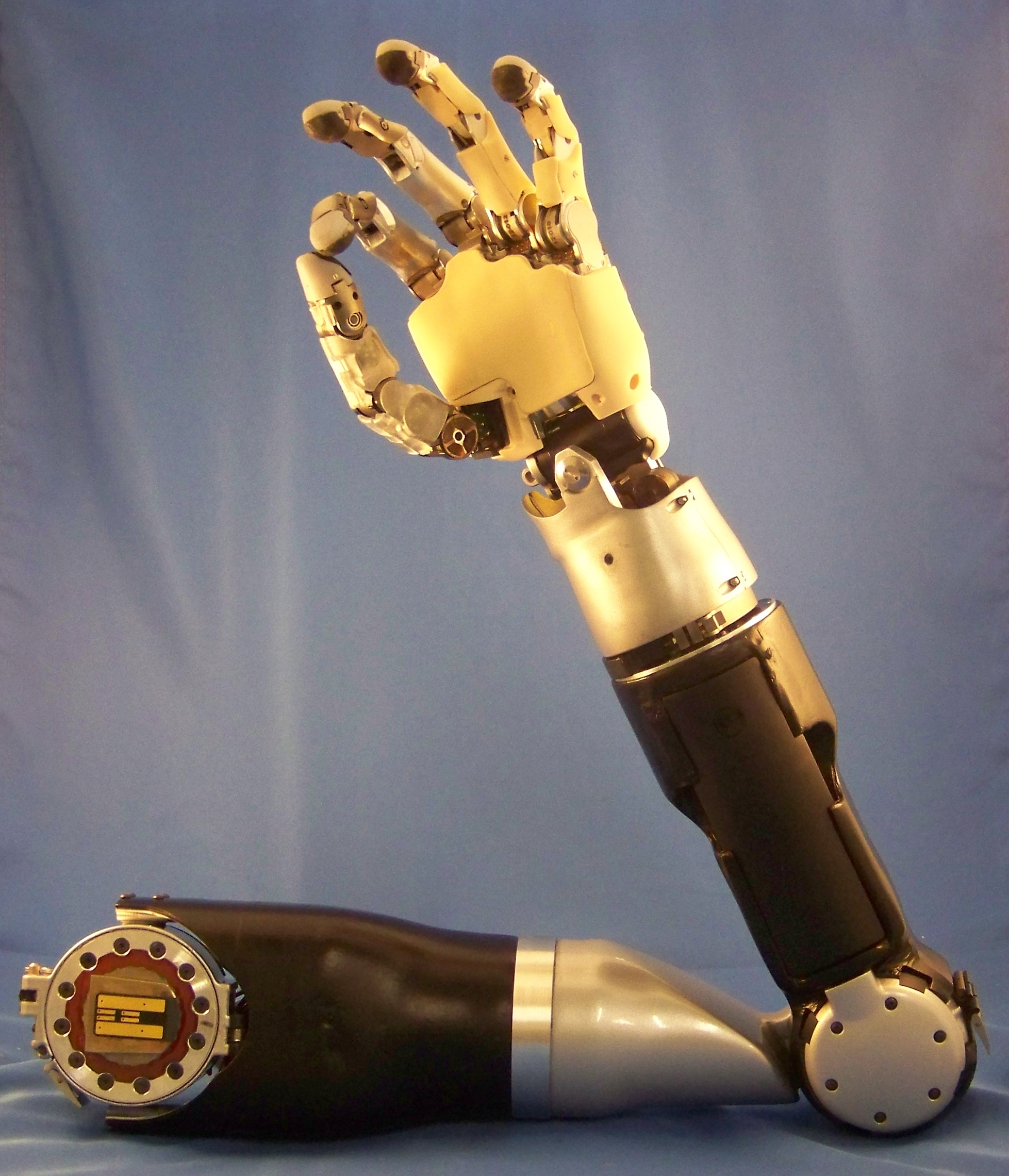
The Modular Prosthetic Limb (MPL) was developed as part of a four-year program by the Johns Hopkins Applied Physics Laboratory and was used by wounded warriors at the Walter Reed National Military Medical Center for the first time Jan. 24, 2012. The upper arm contains a shoulder with two drives (abduction/adduction and flex/extend), a humeral rotator, an elbow, and the power unit. Depending on the amputation level of a particular patient, all of the joints or a subset can be used. The thumb, fingers, and finger abduction/adduction drives was designed as self-contained units with embedded motor controllers containing low-level position and velocity control algorithms with dedicated electrical connections to the palm. The palm contains mechanical attachment points and electrical connectors for all four fingers, the thumb, the finger abduction/adduction units, and the wrist.
DEKA Arm
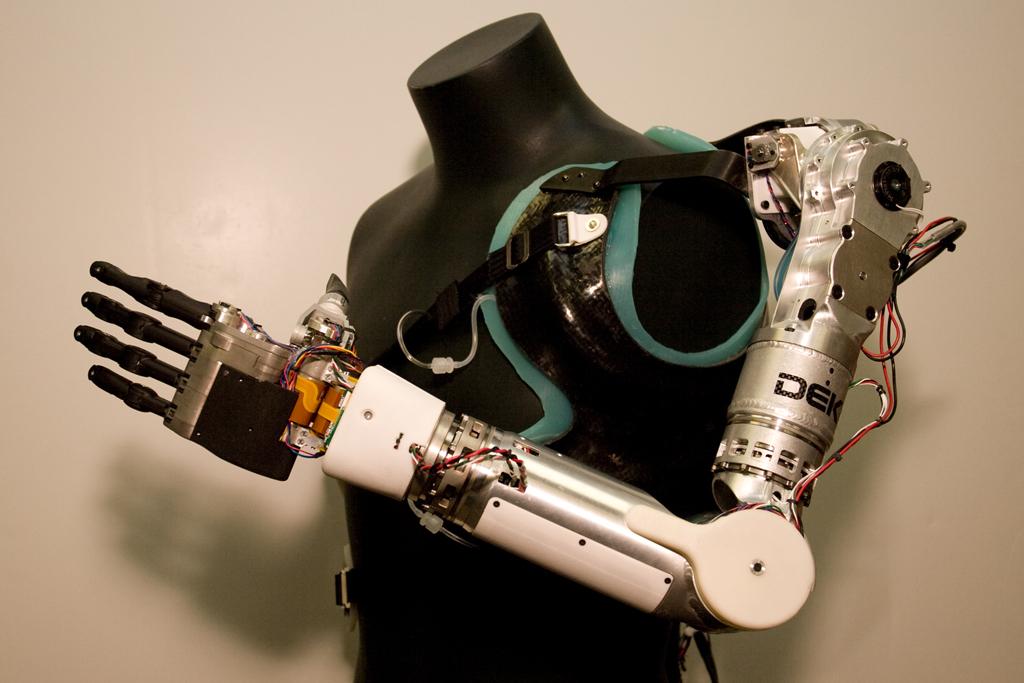
One of the goals of the project is to rejuvenate nerve endings so that they can provide the kind of biological feedback needed to make the limb function as normally as possible. That's difficult to achieve in many cases because nerve endings die within a year of amputation. This device also provides a non-invasive approach through use of a vibrating sensor that sends messages that help the user control the robotic arm.
i-LIMB Hand
The i-LIMB Hand is controlled by a highly intuitive control system that uses a traditional two-input myoelectric (muscle signal) to open and close the hands life-like fingers. Myoelectric controls utilize the electrical signal generated by the muscles in the remaining portion of the patients limb. This signal is picked up by electrodes that sit on the surface of the skin. Existing users of basic myoelectric prosthetic hands are able to quickly adapt to the system and can master the devices new functionality within minutes. For new patients, the i-LIMB Hand offers a prosthetic solution that has never before been available. The modular construction of the i-LIMB Hand means that each individually powered finger can be quickly removed by simply removing one screw. This means that a prosthetist can easily swap out fingers that require servicing and patients can return to their everyday lives after a short clinic visit.
FluidHand

The prosthetic FluidHand is controlled by myoelectric signals from the stump of the arm. Complex electronics and five motors contained in the fingers enable every digit to be powered individually. A passive positioning of the thumb enables various grip configurations to be activated. The myoelectric signals from the stump control the prosthetic hand; muscle signals are picked up by electrodes on the skin and transferred to the control electronics in the prosthetic hand. Batteries provide the necessary power.
Bebionic v2 Hand
(2011)

The Bebionic v2 Hand is a fully upgraded version of a Bebionic Hand. New features include upgraded individual motors for significantly higher operating speeds. To optimise the convenience of wireless programming, the radio frequency board had been redesigned and integrated within the hand and bebalance software has been simplified. On-board microprocessors constantly monitor the position of the digits to ensure that grip sequences are accurate every time, with no loss of control or need to reset. By placing the motors in the palm of the hand weight distribution in the prosthesis has been optimized. Electronics within the hand include a selectable Auto Grip feature that sense if a gripped item is slipping and automatically provide additional power to maintain a secure and safe hold. Fully proportional, speed control allows the user to master delicate tasks such as manipulating an egg or holding a filled polystyrene cup, as easily as crushing an empty soda can.
RP2009 Hand
(2009)
Kinea invented a novel cobotic powerplant to be located in the forearm region, weighing less than two pounds, which couples artificial tendons actuating 15 hand joints to a single electro-magnetic motor via infinitely-variable rolling-contact transmissions. The 15 infinitely-variable transmissions draw power as needed for their respective hand joint from a common shaft driven by a single motor. This architecture proved more lightweight and more power and energy efficient than using 15 motors paired to 15 fixed-ratio drive trains.
RP2009 Arm&Hand
(2009)
The modular prosthetic limb Van Doren Designs designed the finger AbAd actuators/linkages (passive and active versions), finger drive back locking clutches, thumb series compliant elements, slip clutches for overload protection, and the wrist radial/ulnar deviation unit.
AMO Arm
(2011)
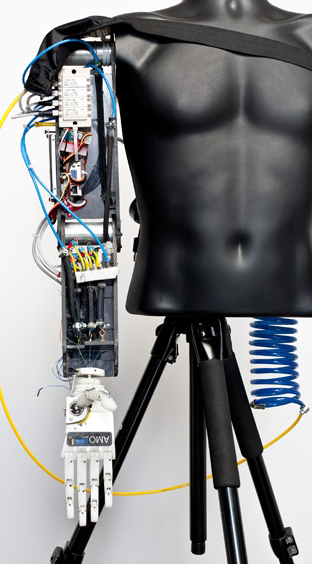
Two Ryerson University undergraduate biomedical engineering students developed prosthetic arm that is controlled by brain signals. The Artificial Muscle-Operated (AMO) Arm not only enables amputees more range of movement as compared to other prosthetic arms but it allows amputees to avoid invasive surgeries and could potentially save hundreds of thousands of dollars. The AMO Arm is controlled by the user's brain signals and is powered by simple pneumatic pumps and valves - to create movements.
Becker Lock Grip Hand

The Lock Grip Hand is a wood bodied hand and is available in sizes 6 to 10. While the Imperial, available in size 8, also has separate 3rd and 4th finger action. There is no weight restriction on the hand regarding lifting. If you can lift it, the Becker hand will hold it. Custom made hands and gloves available upon request. Note: a very interesting mechanical system!
Obsolete, deserted or obscured hand projects
(the links may be broken)
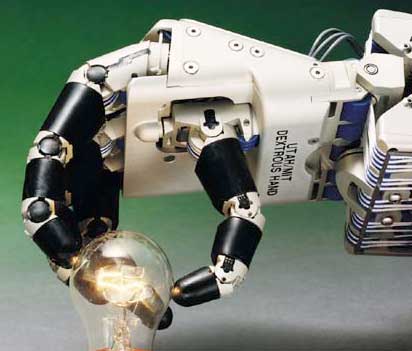
Utah/MIT Dextrous hand (UMDH)
TELESAR 2
MAENO Hand
or click here
H1-1000 Hand

5 New Futaba S3111 Servos with WARRANTY A complete CNC precision machined package of engineered and industrial-styled components All high quality stainless and steel hardware secured with high-grade nylock nuts and Locktite Fixture base, seen in photos, in which to quickly connect hand to for programming (also makes a GREAT display stand) Standard 1/2" wrist socket with 4-40 SHCS grub bolt. Excellent for gripping onto U-Joint wrists, etc. Servo-saver system for hand "compliance" so that the servos will last a long time - no jarring motions when fingers hit objects
$750
Keio Hand

The mass of entire hand is 853g, which is light compare with other robot hands. Width of the palm is 86mm, the length from fingertip to wrist is 203mm, the length from fingertip of thumb to fingertip of little finger is 190mm. This five-fingered robot hand has twenty DOFs.
LUCS Haptic Hand III
The LUCS Haptic Hand III is a five fingered 12 DOF anthropomorphic robot hand equipped with 11 proprioceptive sensors. As the human hand, the robot hand has a thumb, which consists of two phalanges whereas the other fingers comprise three phalanges. Some successful haptic systems, based solely on proprioception, with capacity to recognize shape, size as well as individual objects were implemented with this robot hand together with various kinds of Self-Organizing Neural Networks.
LUCS Arm 1
The LUCS Arm 1 is an anthropomorphic robot arm with in total 9 DOF. It is equipped with 5 proprioceptive sensors. The robot hand is designed in a similar fashion as the LUCS Haptic Hand III but is of a much smaller size and has a reduced number of DOF. The arm is equipped with a flexible elbow and a shoulder that enables horizontal as well as vertical rotation. The robot arm will be used for experimentation with artificial haptic systems as well as in models of interaction between the haptic and the visual system.
ZAR4 Hand

The electronics for each main part of the humanoid robot is divided into a main micro controller and a PWM generating micro controller. The main controller communicates with the main PC for command input, monitoring and failure analysis. It contain the control loop with the interface to the sensor input devices and the manipulating outputs to the PWM controller. The PWM controller drives the switching valves of the muscles via gain driver.
Nike Hand

NT Hand

Scientists are developing a neural interface that can use signals in the brain to control fingers on a robotic hand, shown here.
Bionic Arm
Funding the most ambitious prosthetics project ever, the U.S. military is trying to build a truly bionic arm. The project's second prototype is controlled by thought and capable of providing sensory feedback.
SKKU Hand II

Degree of freedom - 10; weight - 840g; power - DC 24 V (Motor power), DC 5 V
Elu-1 Hand

The Elu-1 Hand was developed for RT-1, a bilateral human-scale robot torso The hand is a powerful 9 DOFs, lightweight unit (740g). All the hand actuators are situated within its volume, eliminating any transmission problems when the hand is mounted on an articulated wrist. The hand is actuated using servo motors fitted with precision gearing with encoders enabling high accuracy positioning.
Edinburgh Electric Hand

The concept proposed was an electric hand possessing multi-articulated digits and a powered thumb that could be positioned laterally and into opposition with the fingers. Crucially, the mechanisms within the hand needed to fit within a silicone glove that was modeled from a real hand.
NAIST-Hand I

The NAIST-Hand I was developed as a platform to investigate dexterous manipulation research including tactile feedback control and robot programming by human demonstration, in particular, to reproduce complex in-hand manipulation tasks. The hand has a total of 12 degrees of freedom (DOFs) in four fingers. Each finger has a total of three DOFs where 2 DOF for the metacarpal phalangeal (MP) joint and one DOF for the proximal interphalangeal (PIP) joint; the distal interphalangeal (DIP) joint is coupled with the PIP joint. A novel three-axis gear driving mechanism that enables the placement of all three electrical motors in the palm region was developed without the use of tendons. Each finger is designed as a module. All joints are driven by gears and link mechanisms without using tendons. All actuators are embedded in the palm.
SENSOPAC Hand
Human-like arm with a dexterous and sensitive hand, controlled by a computer program inspired by the human cerebellum.
Southampton Remedi Hand

At present a multiple degree of freedom device is under development, utilizing lightweight materials to produce a highly functional, adaptive prosthesis. Funding from Remedi (Rehabilitation and Medical Research Trust) has enabled the realization of prototype systems, which will undergo further development and evaluation.
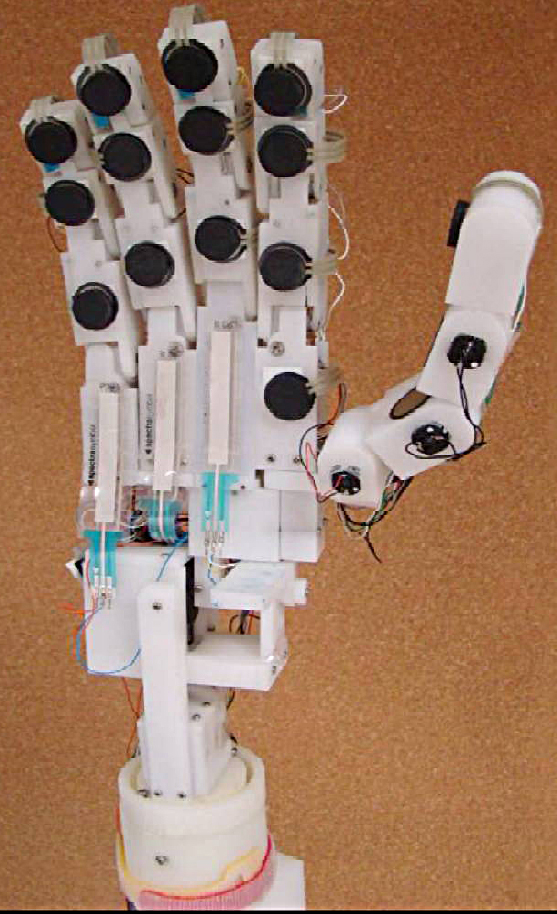
Pneumatic Hand
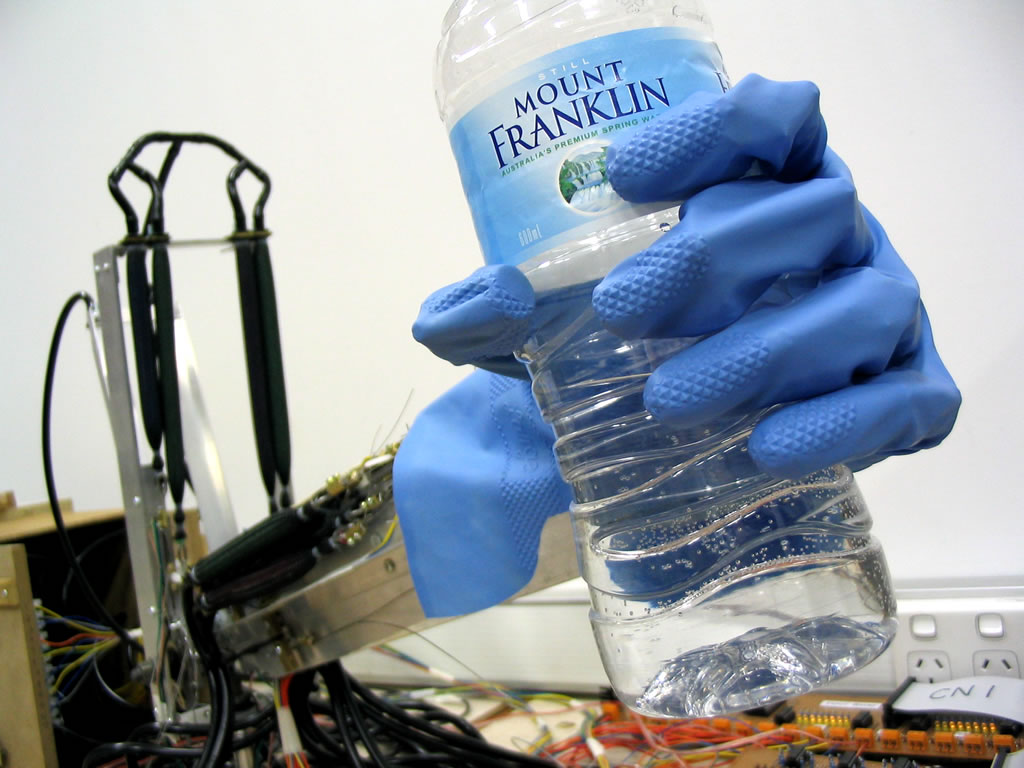
This hand offers 10 individually controllable degrees of freedom ranging from the elbow to the fingers, with overall control handled through a computer GUI. The hand is actuated through 20 McKibben-style air muscles, each supplied by a pneumatic pressure-balancing valve that allows for proportional control to be achieved with simple and inexpensive components. The hand was successfully able to perform a number of human-equivalent tasks, such as grasping and relocating objects.
ISELLA Hand
A new bionic robot arm, built to operate in extreme environments or in repetitive operations, was inspired by the extremely agile elephant trunk and is able to perform extremely delicate operations, without any risk of harming a human being, by completely eliminating the possibility of uncontrolled movements.
CyberHand

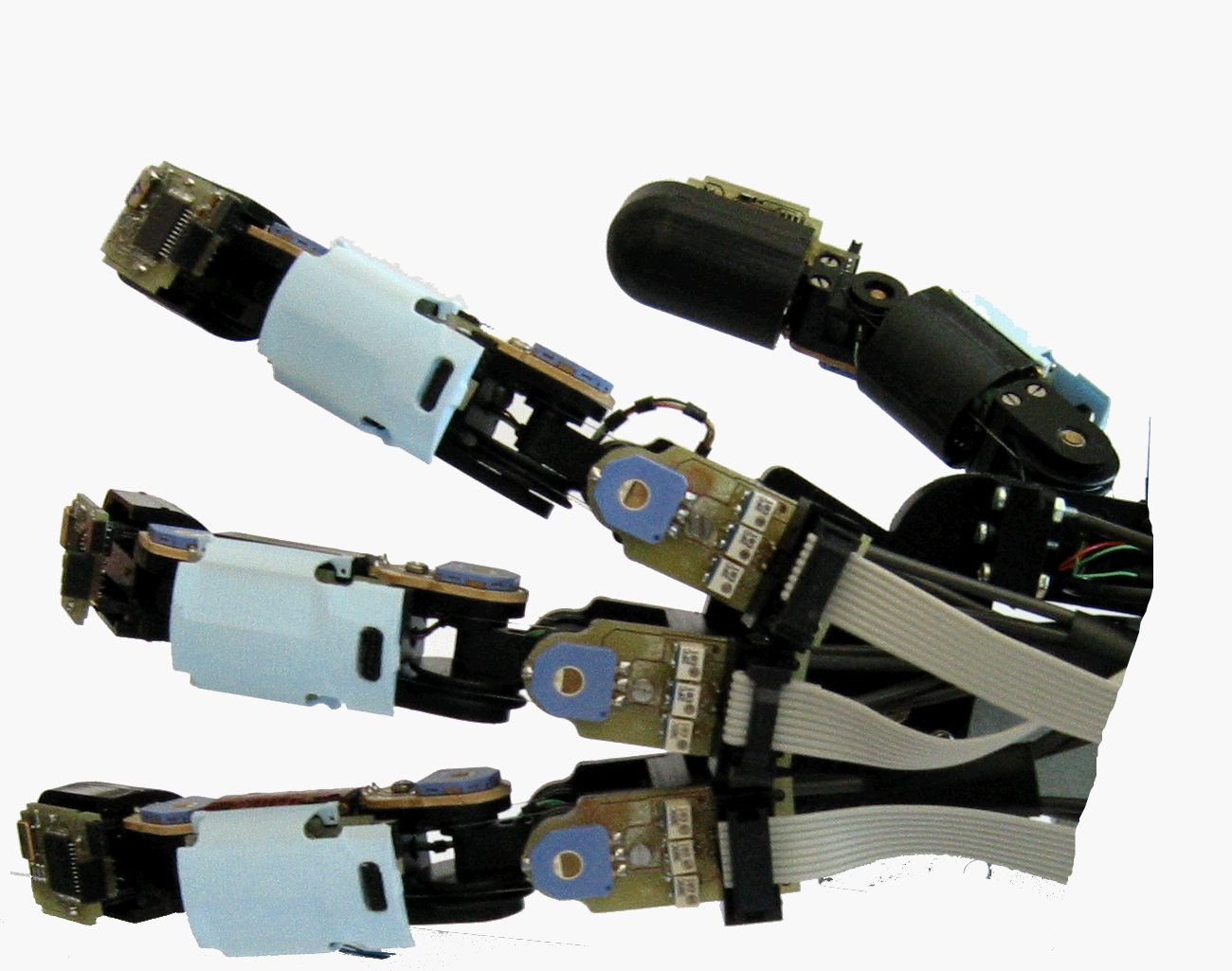
The CyberHand was designed as a prototype for testing and evaluating neural interfaces, control algorithms and sensory feedback protocols. It has 16 DoFs and 6 motors (that is, 6 degrees of mobility, DoMs): each finger of the CyberHand has three DoFs and one DoM (flexion/extension) and the thumb has, in addition, 1 DoM for positioning. The size of the CyberHand is comparable to human hands and can generate many different grasps; its control is currently limited to a subset of functional grasps: lateral pinch, cylindrical and spherical grasps and the tripod grasp.
DLR-HIT Hand I

The Institute of Robotics and Mechatronics
Weight - about 2,2 kg; 65 analog sensors; 4 fingertip force sensors; joint speed - over 180 degrees/s; max fingertip force - 7N; serial communication system (25Mbps, and length up to 5 meters); power source - 24V; power consumption - 0,75A (standby), and 2,7A (grasping); DSP host processor - 225 MHz, 1350 MFLOPS, signal sampling rate - 5KHz
DLR-HIT Hand II

The Institute of Robotics and Mechatronics
On the technological basis of the DLR Hand the German Aerospace Center (DLR) and the Harbin Institute of Technology (HIT) have jointly developed a new robot hand. Compared to the former hands, the new hand, DLR-HIT Hand II, has five modular fingers, each finger has four joints and three degrees of freedom. Nevertheless the new hand is even smaller and lighter. Altogether there are 15 motors inside the finger body and palm. The hand is actuated by commercially available flat brushless DC motors commutated via digital hall sensors. There is an absolute angle sensor and a strain-gauge based joint torque sensor associated to each joint. The high-speed real-time communication bus is implemented by use of FPGAs.
Vanderbilt Arm

Vanderbilt University scientists are developing an arm prosthesis that is powered by a miniaturized rocket engine. The advantage is stronger action of the artificial muscles, faster movement, and no need for batteries.
Bionic Arm

The first prosthesis that merges mind and machine. Electrodes intercept the limb's residual nerve firings and feed them to a computer embedded in the forearm, which then commands six motors to move the device's shoulder, elbow and hand in unison. Thanks to hand sensors, the wearer can even gauge pressure and fine-tune his grip.
Bebionic Hand
(2010)

The Bebionic hand is a fully articulating myoelectric hand.controlled by muscle contraction. Electronics measure electrical changes on the skin covering the control muscles, and command individual actuators in the hand to provide the desired movements. With a life-like and anatomical design, the fingers move together as the hand closes so that objects such as a fork or piece of paper can be gripped naturally between the fingers.