The best five biped walkers
LOLA
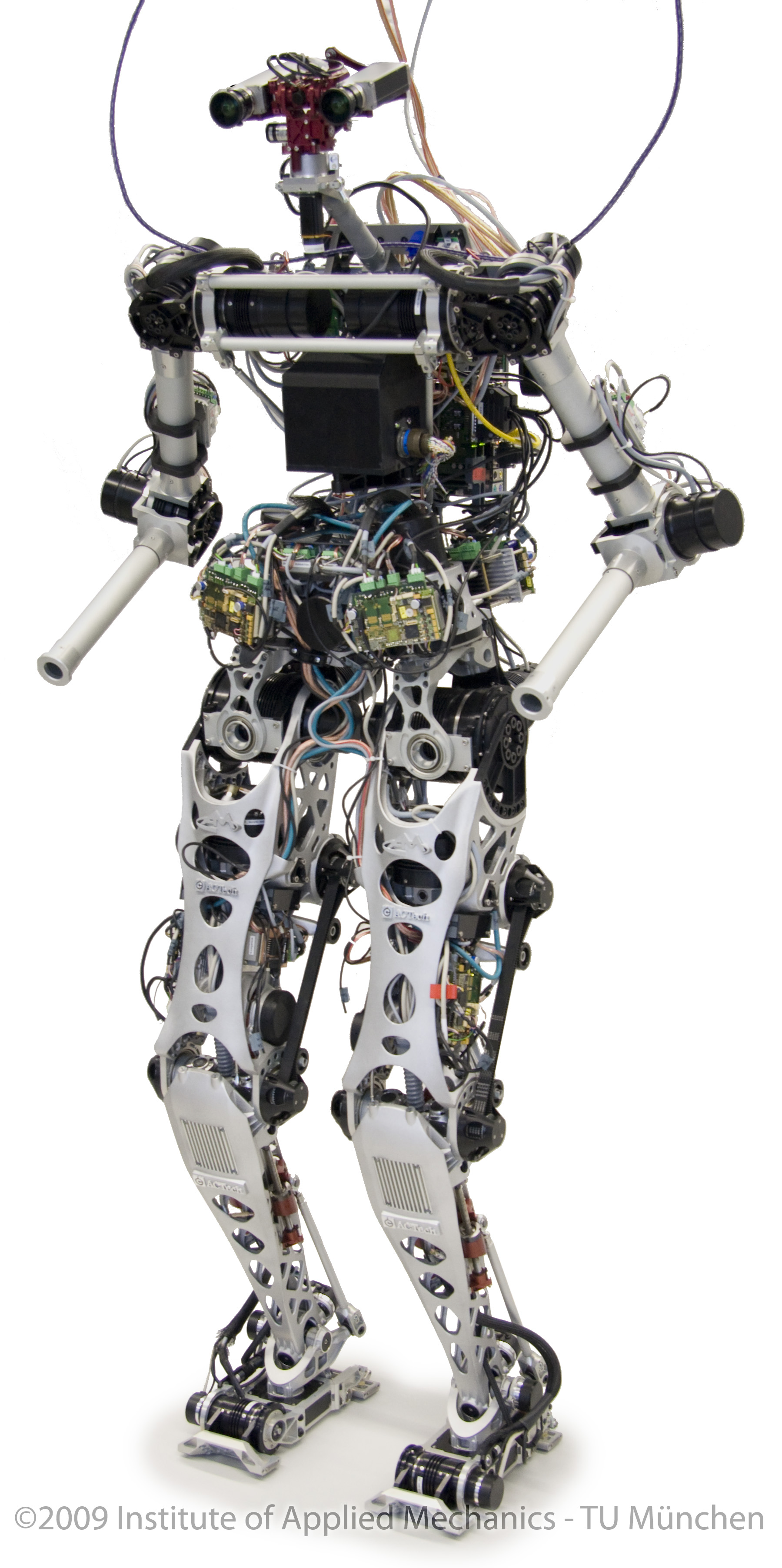
The humanoid robot LOLA is 180 cm tall and weighs approximately 55 kg. Its physical dimensions are based on anthropometric data. The distinguishing characteristics of LOLA are the redundant kinematical structure with 7-DoF legs, an extremely lightweight construction and a modular joint design using brushless motors. The mass distribution of the leg apparatus is improved to achieve good dynamic performance. To improve leg dynamics, new kinematic structures was developed for the knee and ankle joints, where heavier component parts (e.g. motors) are located close to the hip joint axis. LOLA is controlled by an on-board PC mounted on the upper body and several local controllers carrying out low-level tasks, such as link position and velocity control, and sensor data processing. Joint controllers, sensors and the on-board PC form an intelligent sensor-actuator network with central controller.
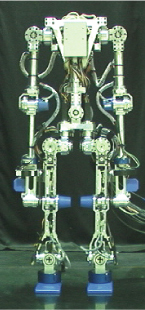
BARt
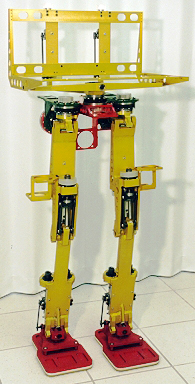
BARt is a bipedal robot with 19 active degrees of freedom. Size: approx. 1,25 m; weight: approx. 35 kg; 19 active joints with Harmonic-Drive gears DC-motors with ratings from 60 W to 150 W Measurement of joint absolute angles by optical sampling. Sensors: four force sensors in each foot, one inertial measurement unit in the torso. Power electronics with DSP, connected via CAN-bus. External main controller: PowerPC with 1 GHz, connected via CAN-bus External power supply with 30 V and 12 V
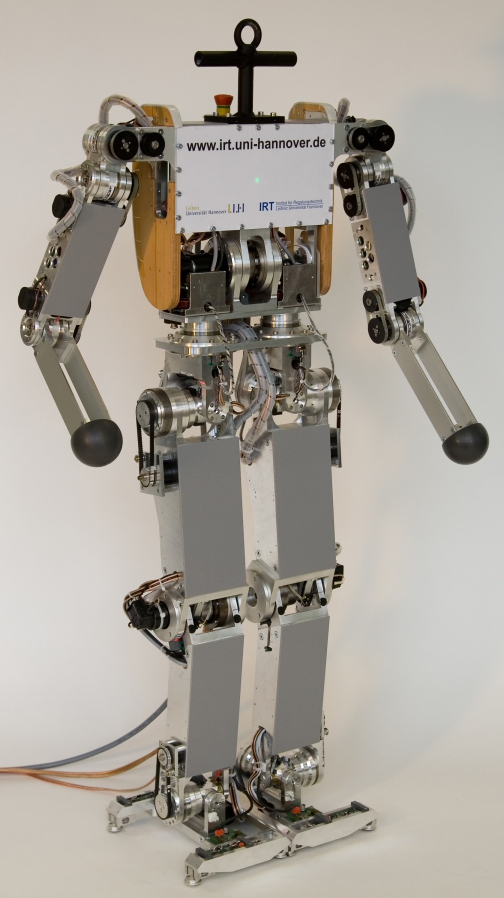
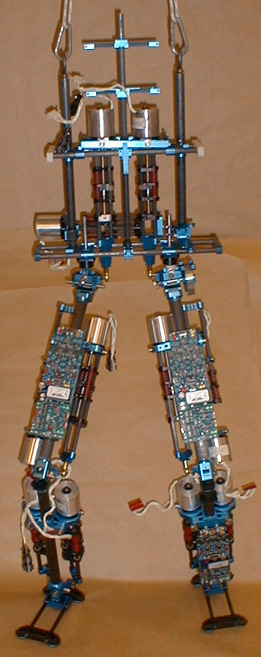
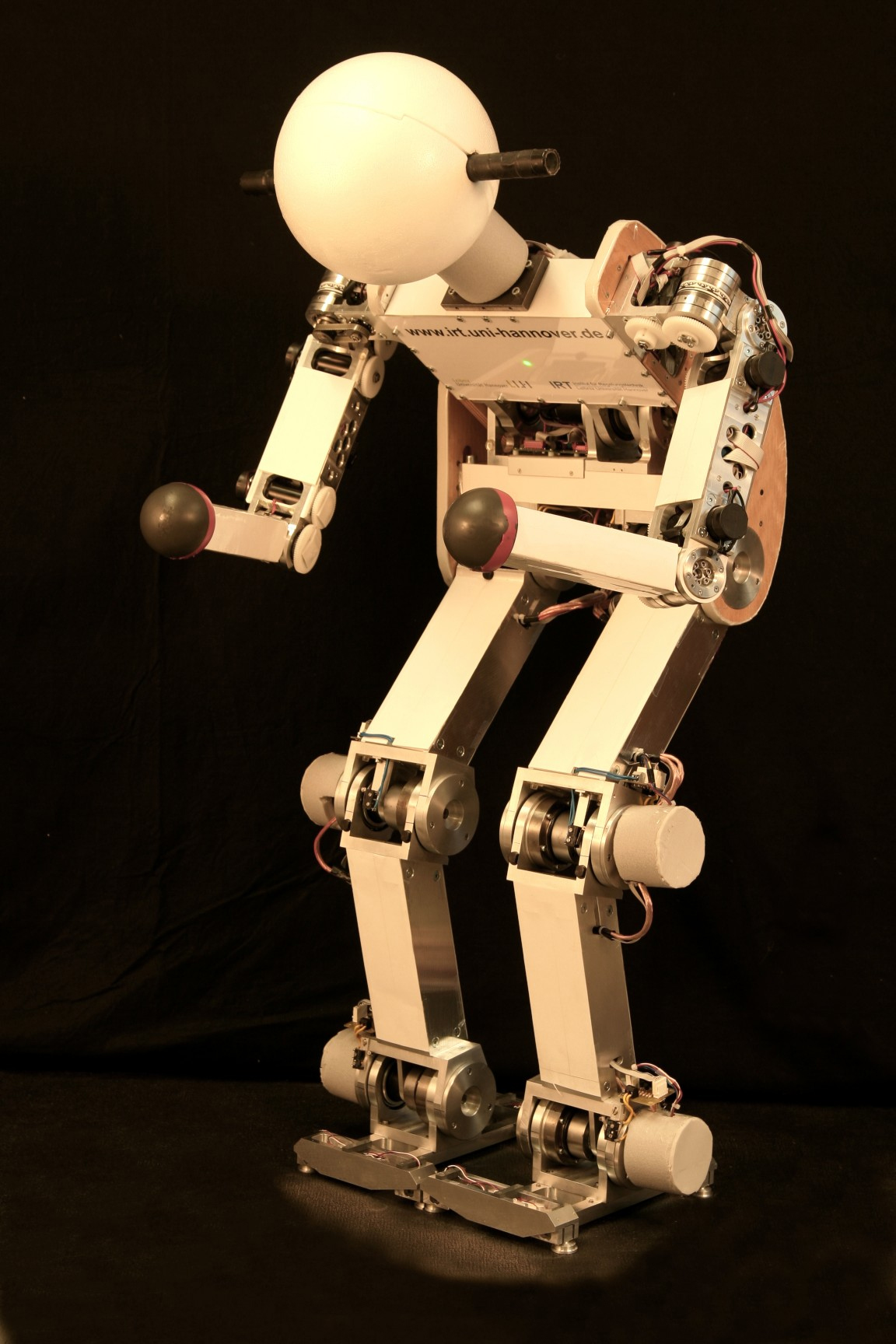
LISA
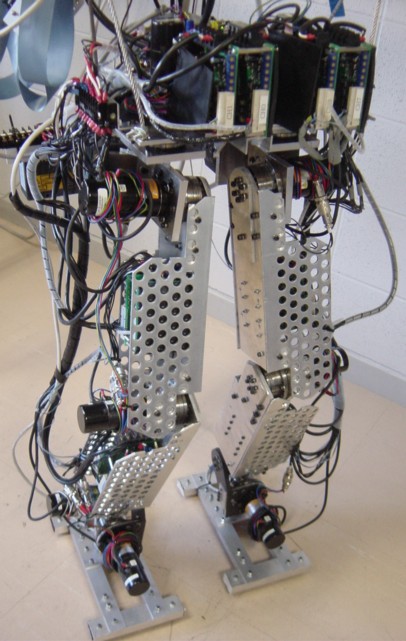
LISA has twelve active degrees of freedom. All axes are actuated by DC motors with harmonic drive gears and are equipped with incremental encoders for the servo control feedback. Each leg has two rotatory degrees of freedom (DOF) in the ankle, a revolute joint in the knee and a ball-and-socket-like hip joint with three rotatory DOF. The hip has been built as a spherical parallel manipulator (see below). Thus, the legs are lightweight, quick and have nearly the workspace (region of movability) of a human leg. Weight - 38kg; height - 140cm; length of upper and lower leg - 35cm; distance between legs - 18cm.
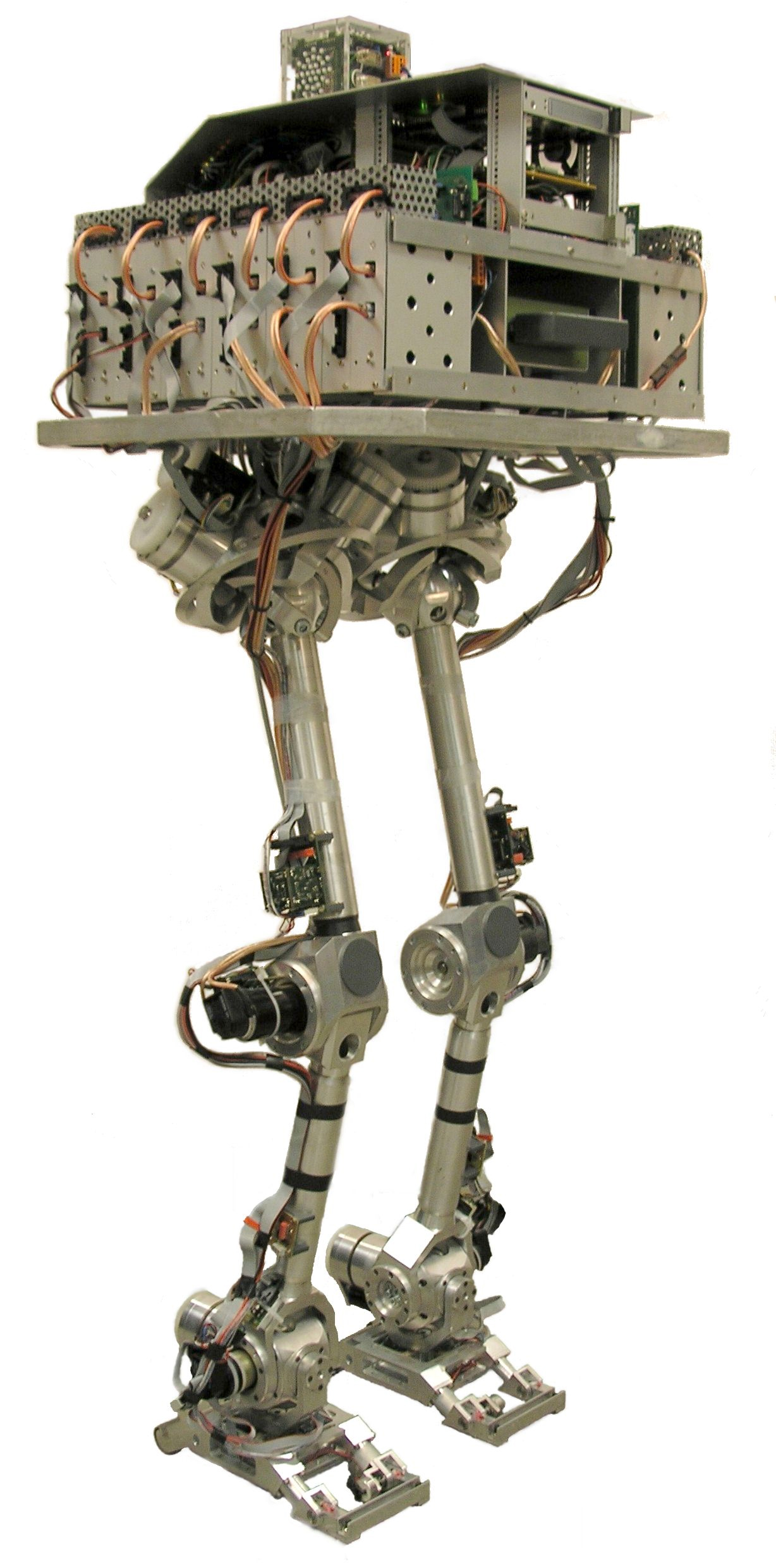
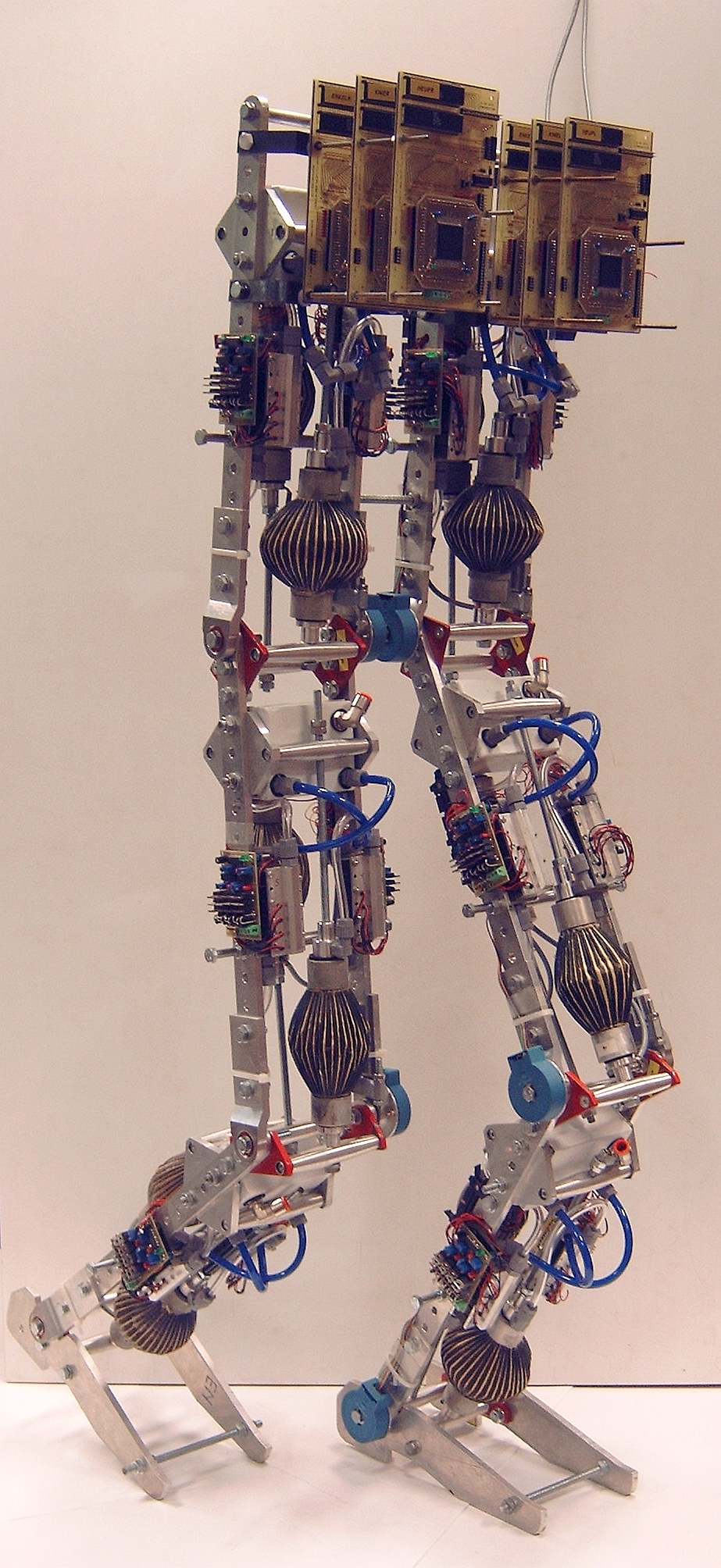
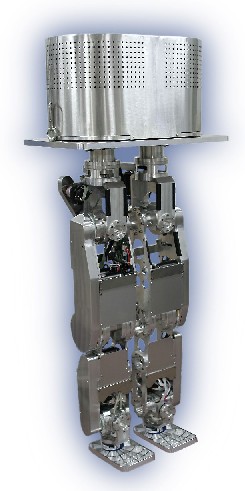
Core
Robot Core is a carrier-type biped locomotion robot of 1915 mm height and 230 kg weight, consisting mainly of two legs (six joints each) and payload racks. Core is capable of human-like walking with additional on-body payloads up to 100 kg (corresponding to a human). In order to allow heavy loading works, a huge-power brushless motor, specially developed for this prototype, is applied for each leg-joint drive, while an impulsive force absorbing system, also developed for this prototype, is effectively installed at each foot. A number of sensors are distributed on the body to measure and manage the dynamical state of the walking motion and the electrical state of the power units for stable and safe walking transfer.
DLR-Biped

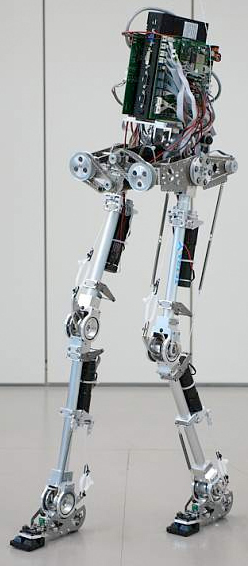
The DLR-Biped walker was designed to study biped locomotion for potential use in domestic service robots, which may need to climb stairs or step over small obstacles. In order to keep the overall weight low, the leg kinematics was restricted to a kinematically non-redundant configuration with 6 DOFs. This allows to control the motion of the center of mass (COM), the spatial motion of the swing leg with respect to the stance leg, and the trunk orientation. For the kinematic structure from the hip to the knee, the link segments of the DLR lightweight arm have been used, while a new lower leg was designed. The ankle pitch axis is driven by a rod mechanism by a motor located just below the knee. For the roll axis a small motor unit could be used. For the feet, the robot currently is equipped with simple plates with a minimum damping layer and a (compared to other biped robots) narrow foot size (!) of less than 10 cm. The overall weight of the system is about 50 kg, with a mass of 18 kg in the trunk.
The advanced biped walkers
Flame
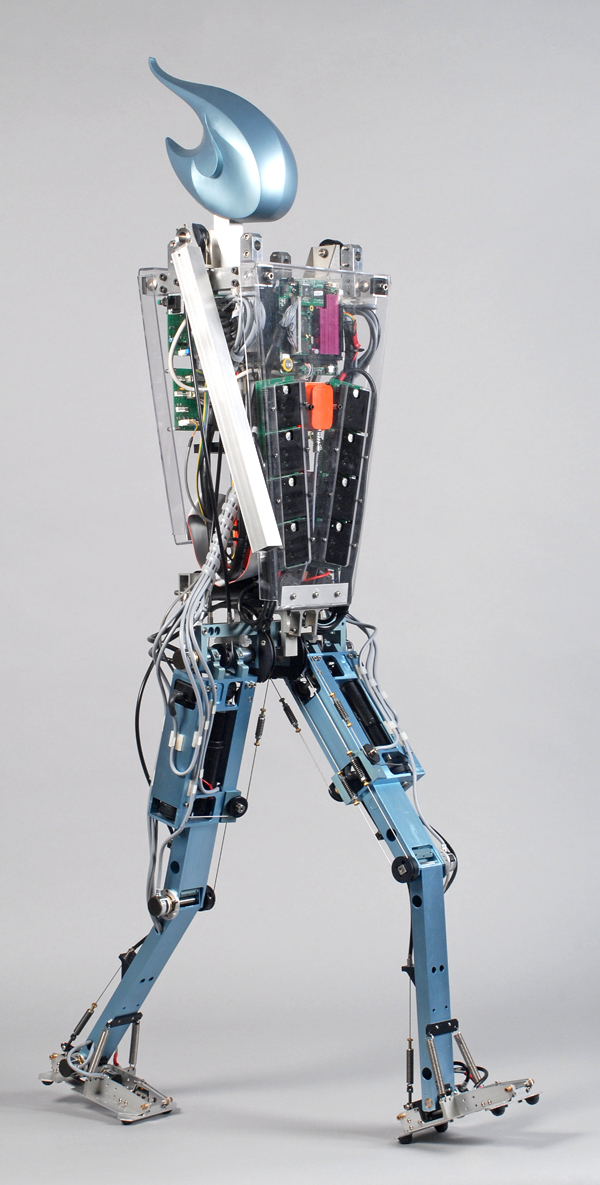
Flame is first fully 3D walking robot with electric actuation. Maxon DC motors are used to actuate several joints: two sagittal ankle joints, two sagittal knee joints, two sagittal hip joints and one lateral hip joint (for sideways foot placement). All the actuated joints in the sagittal plane are implemented with series elastic elements that allow the application of torque control. Next to the actuation, all joint are equipped with incremental encoders that measure all joint angles and indirectly the elongation of the elastic elements. Overall, Flame weighs approximately 15 kg and is about 1.3 m tall. At now it walks at a speed of 0.45 m/s and is able to handle stepdown disturbances up to 8 mm.
TUlip
Length - 1,2 m, walking speed - 0,5 m/s, degrees of freedom - 14, operating time - 30 min. TUlip robot was designed to be able to do straight walking, slow and hard turns and fall and stand up. For this purpose the robot has additional controllability (additional active degrees of freedom), increased maximal torques and range of motion as well as increased design robustness. All control is performed on a PC104 single board computer. Control input data consists of motor and joint encoder signals, inertial sensor data, foot contact switches and user definable switches. Additionally, TUlip is fitted with two cameras and load sensors and accelerometers on the feet. All data acquisition is performed using I/O cards (analog and/or counters) which are stacked on the single board computer. The control signals are sent to current control amplifiers that drive all motors. The low power electronics and motor electronics are powered separately by lithium polymer battery packs which can deliver a robot operating time of about 30 minutes.
see more... about TUlip walking stability see here...
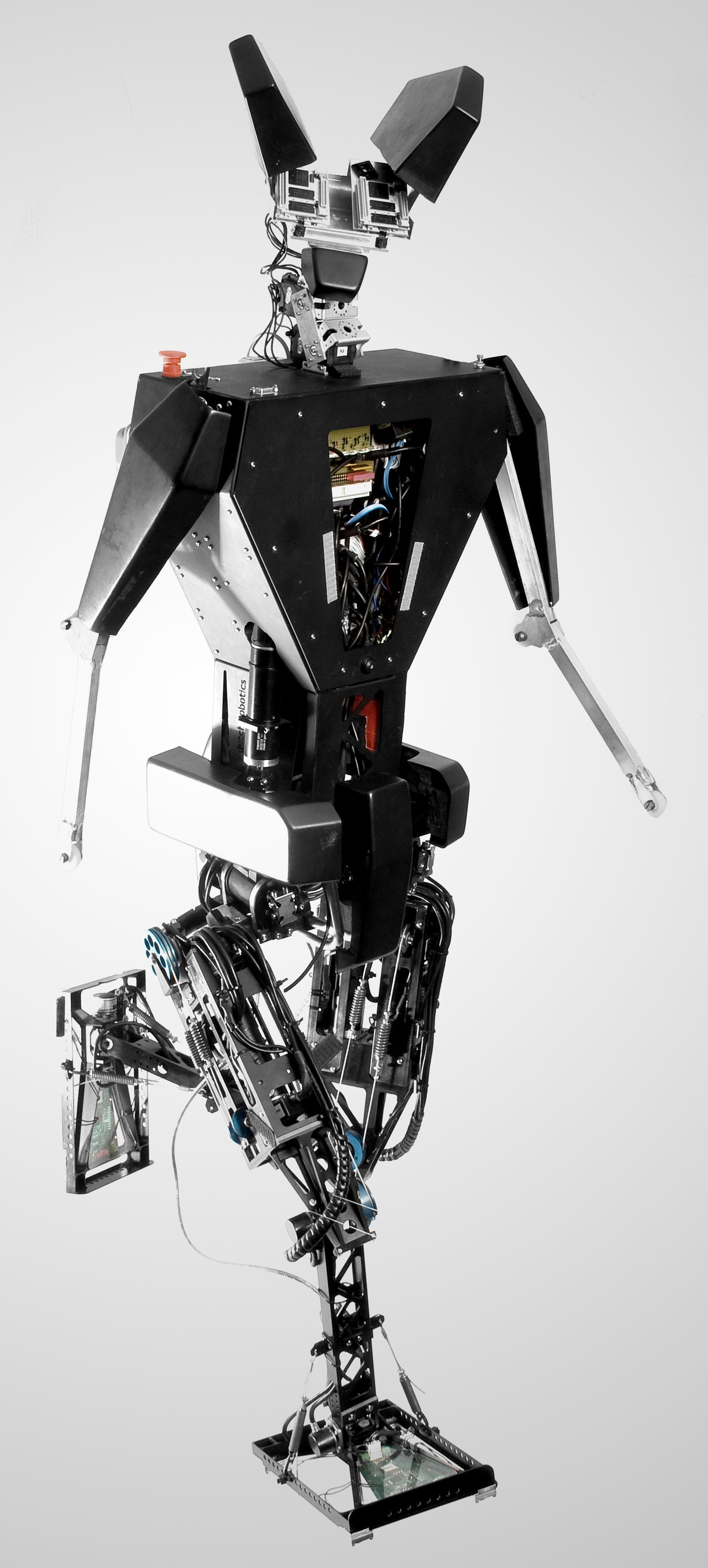
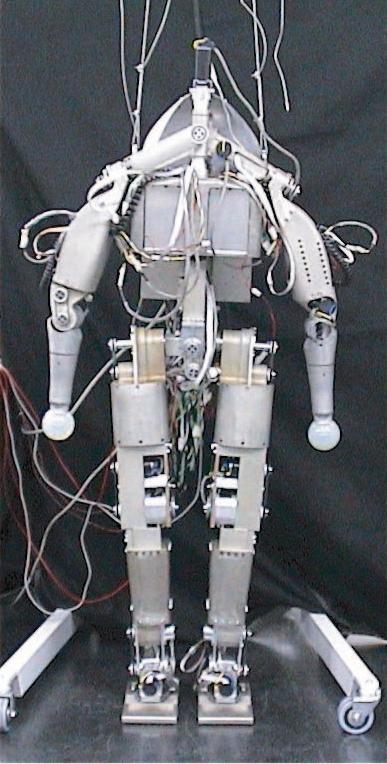
AAU-BOT
(2009)
The aim of AAU-BOT project was to develop the mechanical design of a human-sized anthropomorphic biped robot, including the mechanic and electric power transmission. The main objective in the design of the robot is to keep the weight on a minimum. The overall dimensions of AAU-BOT are: height 1800mm, width 660mm and depth 270mm. The total mass is approximately 70kg, assuming 2kgs of bolts, screws and wiring. The 17 actuated joints are driven by 23 DC motors, which each require their own servo amplifier. The mechanical power transmission for all joints is composed by a HD gear unit connected to the motors by a belt drive.
WABIAN-2/LL
(2004)
WABIAN-2/LL is a legs of WABIAN 2R and KOBIAN humanoid robots. In order to realize more human-like walking motions, each leg has 7 DOFs (conventional biped humanoid robot had 6-DOF in each leg). By having 7-DOF legs instead of 6-DOF legs robot will have the same ability as human to walk smoothly even needed changing step. The legs mechanism also has two additional DOF (roll, yaw) in waist part, which allows robot to walk with knee streched position due to the independent orientation of trunk movement.
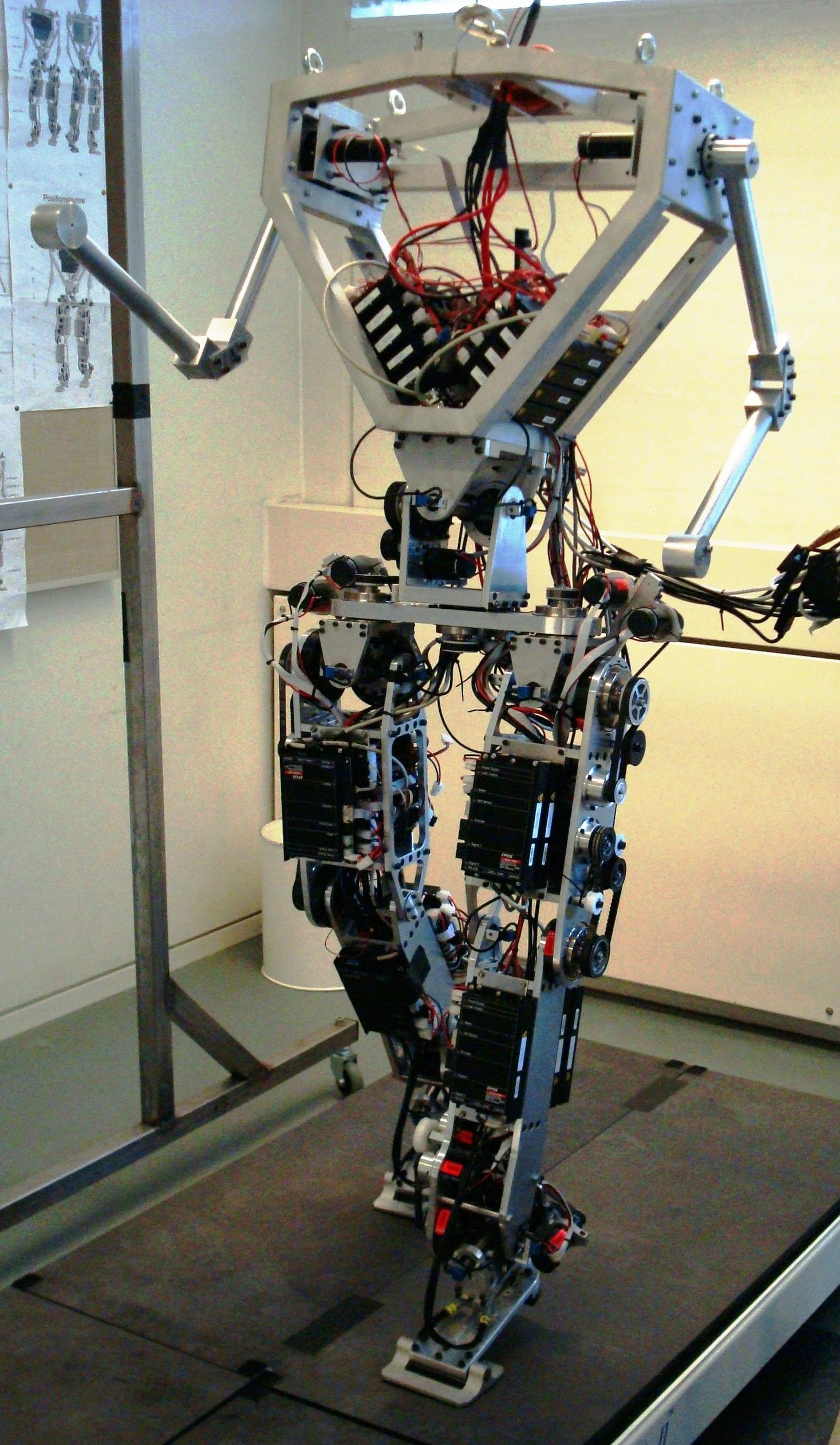
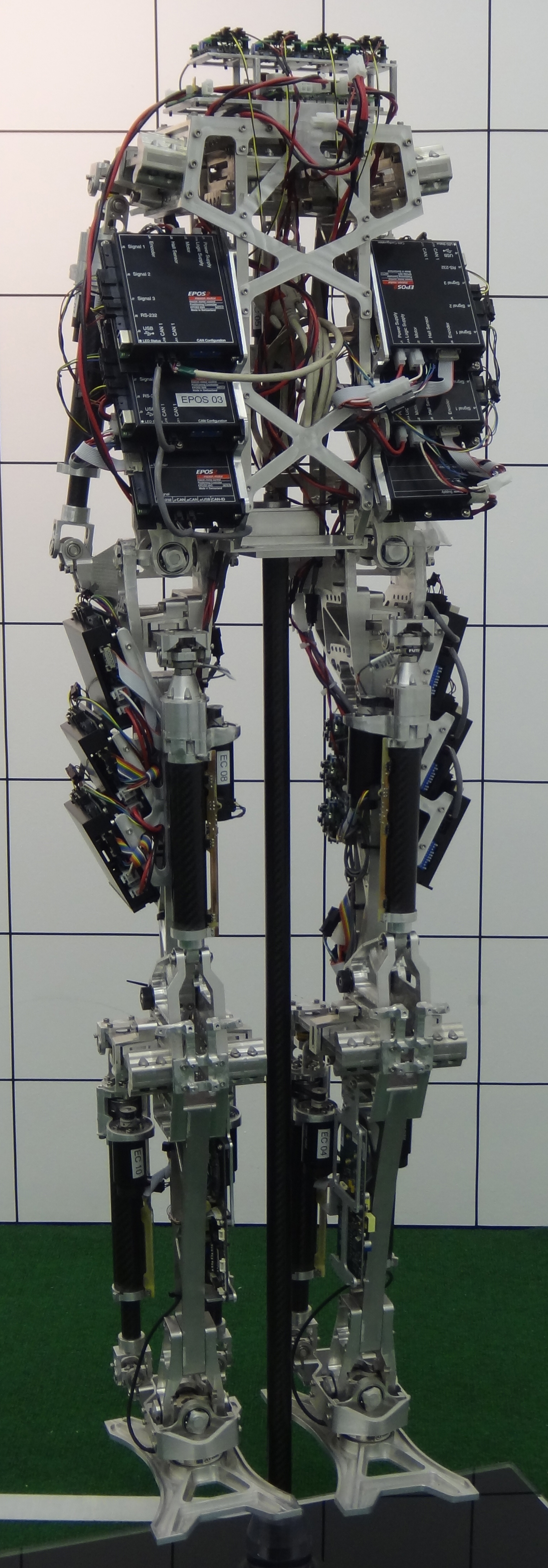
SCHUNK
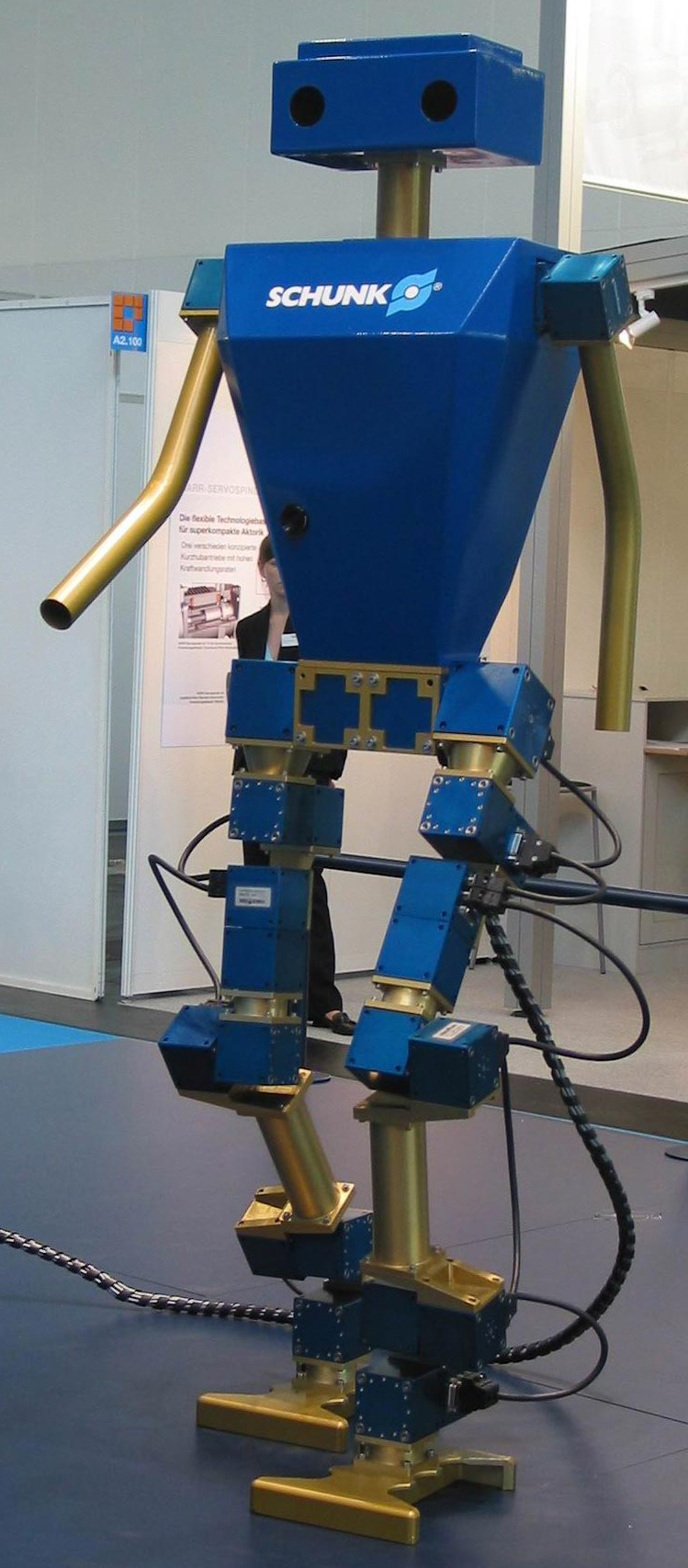
Institute for Robotics Johannes Kepler University of Linz
The robot SCHUNK walk at a rate of 0.5 km/h and climb stairs thanks to its human-like degrees of freedom in its legs (ankle x2, knee x1, hip x3). It stands 165cm tall and weighs 53kg, and is actuated by 14 PowerCubes (modular, compact harmonic drive gears). For a perception used Microsoft Kinect device. Specially designed force-torque sensors based on strain gauges in its ankles allow it to determine the ZMP (zero moment point) in order to maintain its stability. Additionally, it had a stereo camera set-up in its head for sensing depth. Also the robot has the ability to walk in the presence of unknown parameters as an unknown environment, unknown perturbations or uncertain kinetic values.
see more pdfs here... and here... also in this article briefly described robot walking algorithm
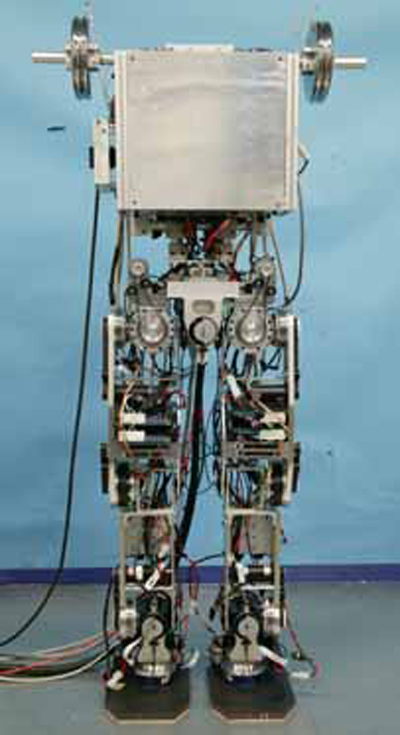
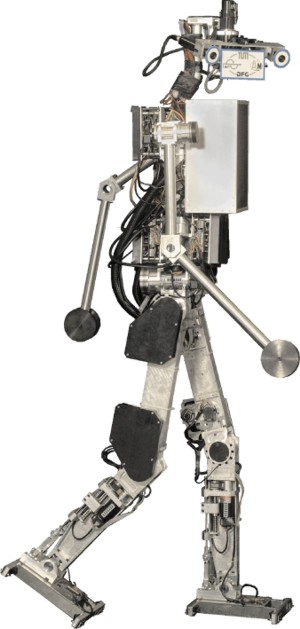
Yobotics-IHMC Biped
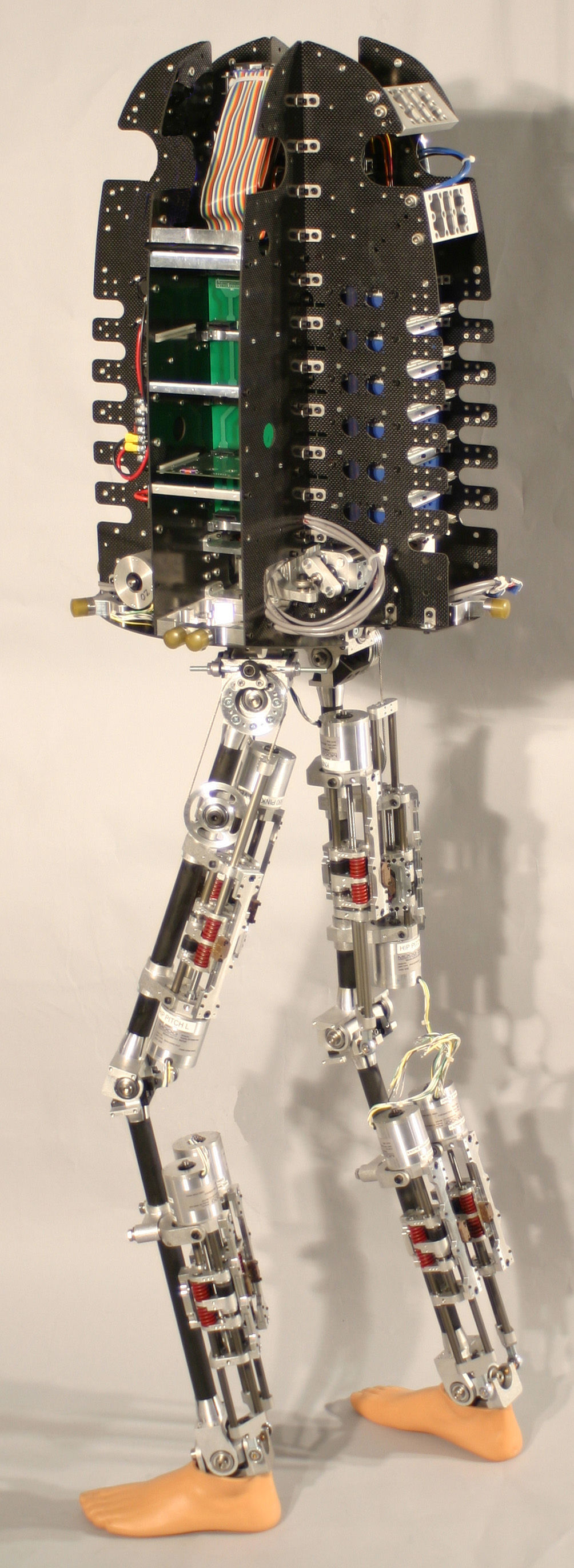
Institute for Human and Machine Cognition (IHMC)
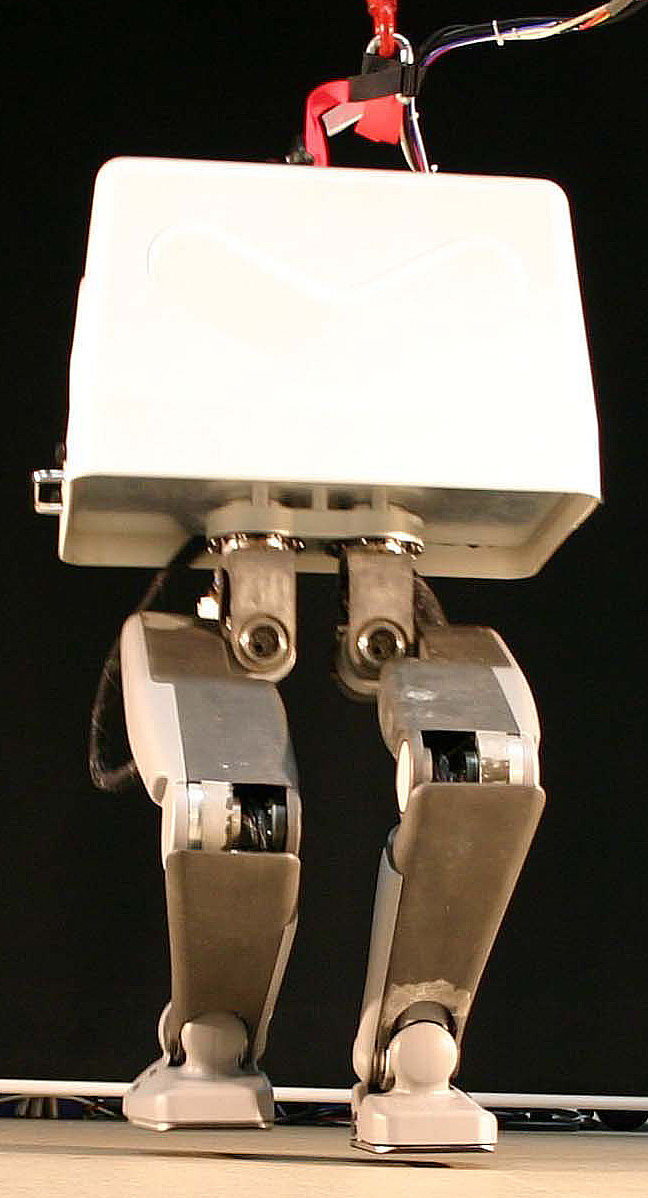
The Yobotics-IHMC Biped is a lower body humanoid robot with 12 actuated DOFs. The robot and based on the MIT Leg Laboratory robot "M2". It was designed and built in 2007-2008 and initial walking algorithms were developed in 2008-2009. Series Elastic Actuators are used to get high fidelity force control at each joint. An on-board PC104 running Real Time Java is used to control the robot.
Pneumat-BT
The height of Pneumat-BT is 1,12 m, weight approx. 9.6 kg excluding the cartridges. The robot is designed to be self-contained: it has all air valves, control boards, and a battery on the body. A compressor is used to supply 1 MPa compressed air to the regulator. The pressure to the air valves is regulated in either 0.5 MPa or 0.65 MPa. The robot has 13 degrees of freedom each of which is driven by an antagonistic pair of pneumatic actuators. McKibben pneumatic artificial muscles was used to drive the joints.
FIBO
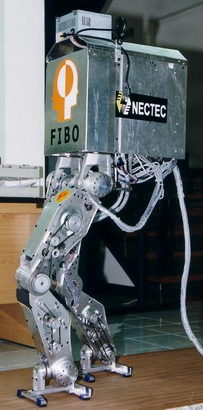
FIBO realizes the significance and impact of new technology associated with the development of a humanoid robot. Examples of such technology are real-time three dimensional balancing of dynamically unstable system, vision system and artificial intelligence. The analytical part of this research will be devoted to the extension of Kane�s dynamics theory, ZMP, Gravity Reaction Force and Conservation of Energy. The stability of walking motion will be enhanced through the use of visual information. In addition, FIBO will design a novel, omni-directional leg mechanisms, which will be installed in our humanoid prototypes.
BIP 2000
(2000)
The BIP2000 robot includes two legs, two feet, a pelvis and a trunk. It has 15 active joints. he BIP2000 robot is equipped with only 15 articulations, 2 at each ankle, 1 at each knee, 3 at each hip and 3 between the pelvis and the trunk, what is already hard enough to build and to control. The mass distribution, the kinematics and the capacities of the robot in terms of joint torques are close to the ones of humans. The transmissions are specific screw/nuts-bused systems which have good dynamic performances, and small size. They are arranged in parallel at the ankles and at the trunk/pelvis linkage. The control schemes either are based on a control of the center of mass associated with suitable task functions, or take dynamically into account the unilateral constraints foot/ground.
ODA
ODA robot control approach actively utilizes the deflections at ankle for detecting the ZMP (Zero Moment Point). The deviated center of gravity (COG) due to the ankle's deflections is measured in real-time by laser distance sensor mounted on the hip. Assuming the two mass model at COG, the equivalent reaction force relating to COG deviation is used as feedback signal for ZMP stabilization. In this approach ZMP can be detected by Laser Sensor or Vision Sensor instead of force sensing.
BioBiped
Biologically inspired, compliant humanoid robot BioBiped realize human-like three-dimensional running, walking and standing and herewith allowing the free selection of speed and gait. The robot has three-segmented legs actuated by compliant mono- and bi-articular structures mimicking the main human leg muscle groups with series elastic actuators using cables with springs in combination with electrical actuators. The total weight of BioBiped is 9,2 kg.
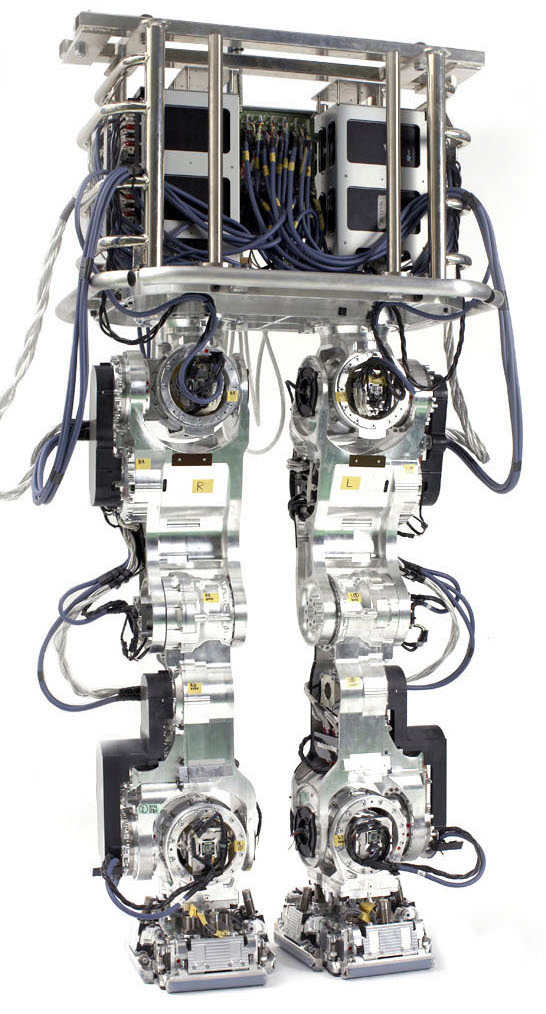
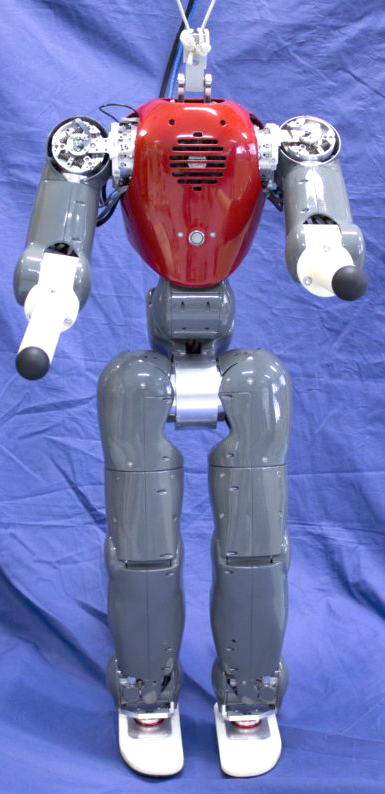
HRP-2LR
(2004)
HRP-2LR is a 12 DOF biped robot whose legs have humanoid configuration. Its total weight is 31 kg and the height is 1.27 m. The body contains a 3-axes acceleration sensor, three gyro sensors, twelve servo drivers and a CPU board (Pentium III, 933 (MHz)). Each foot is equipped with a 6-axes force sensor and rubber bushing which protects the sensor and robot from the touchdown impact. The robot can run with a speed 0.16 m/s (0.576km/h) and jump time 0.06s. The running was realized by using prescribed pattern and stabilized by running controller. The running controller consists of body posture control, inverted pendulum stabilization, contact torque control, impact absorbing control, foot vertical force control and torque distribution control.
see more: robot description... running controller...
Athlete
(2008)
Researchers at Tokyo University�s ISI Lab presented their Athlete Robot. The muscle-tendon system of the robot corresponding to the anatomical structure of the human. The McKibben pneumatic artificial muscles have an extremely high power-to-weight ratio and are configured to match the human anatomy, including range of motion. For example, Athlete is capable of jumping 50cm into the air, which is remarkable for a robot of its size. Thanks to its elastic properties (power and compressed air is supplied externally), the robot can land softly from a 1 meter drop � a big problem for conventional geared robots. The researchers found that they could also control the falling direction after ground impact by changing the stiffness of the joints. The robot weighs only about 10kg for all, and its tall is 125cm.
see also: brief article... more complete article... (or go to ISI Lab page)
COMAN
(2011)
The COMAN humanoid robot is being developed to achieve a qualitative jump toward rich motor behavior in robotic systems, rigorously following a systematic approach in which novel mechanical systems with passive compliance, control and learning solutions will be integrated. The lower body includes the lower torso (housing the waist module) and the two leg assemblies. The height of the lower body of COMAN from the foot to the waist is 671mm, the total lower body weight is 17.3kg. The compliant leg has an anthropomorphic kinematic form composed of the hip, the thigh with the knee joint, and the calf with the ankle joint and the foot. The hip joint is based on a single side supported cantilever base structure with a pitch-roll-yaw arrangement providing a large range of motion. The knee joint is directly driven by a series elastic actuation group placed at the centre of the knee joint. For the purpose of assembly optimization the compliant module for the ankle flexion motion has been separated from its motor unit and placed at the ankle side while the actuator of this module is housed inside the calf section. Torque to this joint is transferred through a solid link transmission that also provide additional variable secondary gearing.
SAFFiR
(2012)
SAFFiR is a bio-inspired bipedal robot designed for finding and extinguishing fires aboard naval ships. The first full-fledged robot in this project, named ASH (Autonomous Shipboard Humanoid), is powered by custom linear serial elastic actuators that incorporate custom titanium springs. It will utilize an advanced sensor suite to navigate the difficult environment caused by smoke, heat, and water vapor. ASH is designed to use many available fire suppression methods including hoses, fire extinguishers, and PEAT canisters. It will be protected by high-temperature thermal shielding, and is designed to traverse a ship environment including difficulties such as stepping over sills and walking in sea state conditions. SAFFiR legs has 12 DOFs, driven by 10 linear actuators 10 (5 per leg) and ankle feedback 6-axis F/T sensor.
PETMAN
(2011)
PETMAN is an anthropomorphic robot for testing chemical protection clothing. Unlike previous suit testers, which had to be supported mechanically and had a limited repertoire of motion, PETMAN will balance itself and move freely; walking, crawling and doing a variety of suit-stressing calisthenics during exposure to chemical warfare agents. PETMAN will also simulate human physiology within the protective suit by controlling temperature, humidity and sweating when necessary, all to provide realistic test conditions.
Strange, dubious, deserted or obscured machines
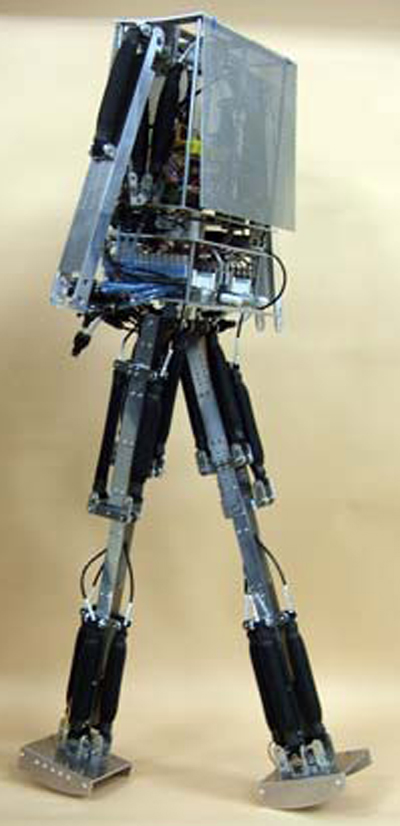
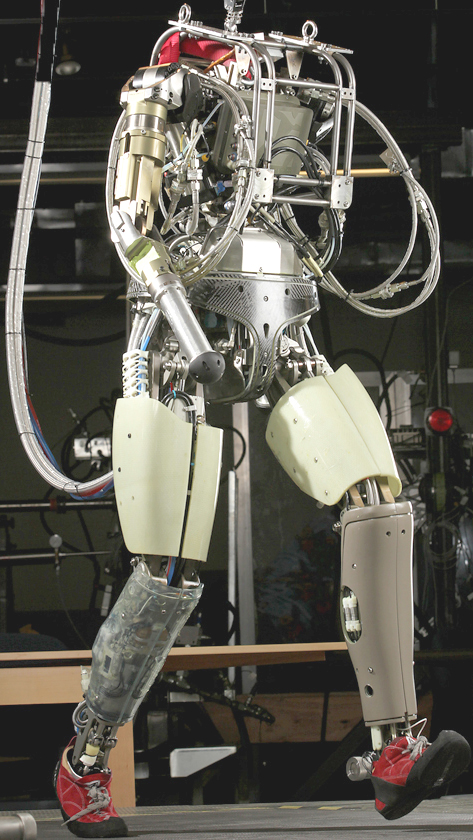
M2
(1998)
M2 is a 3D bipedal walking robot which was developed in the MIT Leg Laboratory. The walker has human proportions which allows it easy comparison with biomechanics data. Human sizing also allows for use of large, standard components which are easy to see and debug. The robot has 12 active degrees of freedom: 3 in each hip, 1 in each knee, and 2 in each ankle. Series Elastic Actuators are used for all of the active degrees of freedom. These actuators provide force control as well as shock tolerance. he low output impedance of the actuators allows us to take advantage of the robot�s natural dynamics. All joints employ the same actuator design to minimize complexity and facilitate repairs. Each joint (most importantly the knee) has adjustable stops with rubber pads. The foot of the robot is equipped with a passive toe joint. This joint has an adjustable range as well as a return spring.
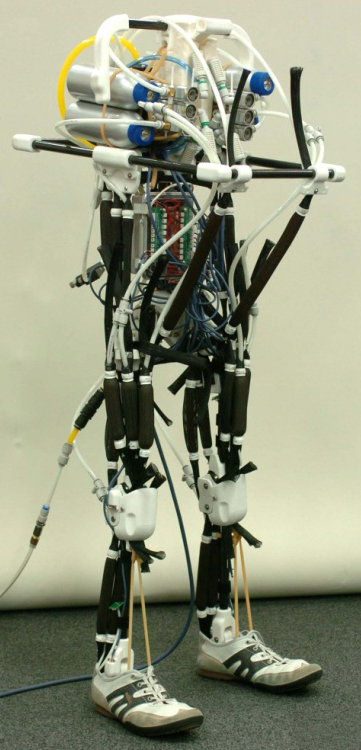
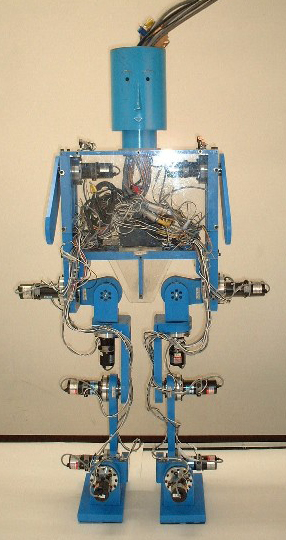
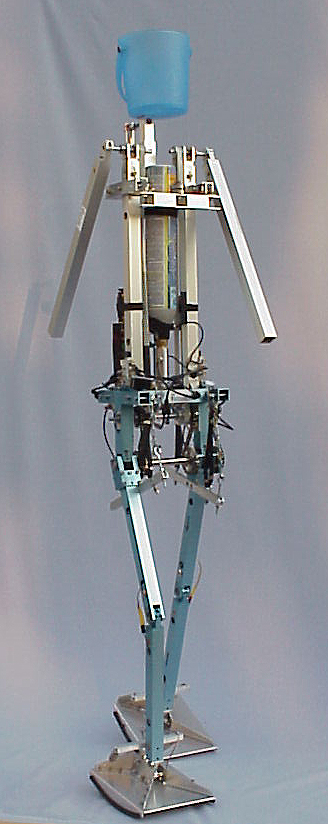
Lucy
The configuration of this biped is anthropomorphic focusing on the lower walking part which is composed of two articulated legs. The robot, all included, weighs about 30 kg and is 150cm tall. This robot is restricted to move only in the sagittal plane due to it�s one dimensional joints of which each of them are powered by an antagonistic pair of Pleated Pneumatic Artificial Muscles. These muscles are lightweight pneumatic actuators which work at low pressures and can be directly coupled without complex gearing mechanisms.
Gorilla Robot
(2004)
Gorilla Robot I, II and III had been developed as the multi-locomotion robot. These robots had been designed to perform biped locomotion, quadruped locomotion and brachiation. The real-time operating system VxWorks (Wind River Systems Inc) runs on a Pentium III PC for processing sensory data and generating its behaviors.
DIEES Biped

The mechanical structure of each leg is made up of four links, corresponding to the pelvis, thighbone, shinbone and foot respectively, jointed by three joints and five degrees of freedom (Dof). In particular the knee joint is moved by one rotational Dof, whereas the ankle and the hip joints, are realized through an universal joint implementing the pitch and the roll Dof for each articulation. As it is possible to see, the whole structure is very compact and reflects the typical anthropometric mass distribution of the human beings. The link dimensions are also human inspired, so the femur is 40 cm long whether the tibia is 35 cm long. Thus, the whole structure is about 110 cm high from the ground, for a total weight of about 12 Kg for each leg.
MARI-1
height - 120cm; weight - 25kg; 6 DOF for 1 leg, 1 DOF for 1 arm, total: 14 DOF; gyro sensor at body center; ZMP sensor and force sensor installable in sole; control via DSP
MARI-3
currently unknown (in Japan)
8
UT-theta 2
Height - 150 cm, Weight - 45kg, Number of Joints - 20. The basic concept is the same of UT-θ however, the actuators and the gears are more powerful than UT-θ, the legs and hip (Double spherical joint) parts more stiff, and TMC1Controler/TMD1Driver(3TEC) for motor drivers (D/A conversion, A/D conversion, and pulse count) enables independent joint position control through serial input from main PC. The main feature of UT-θ2 is its shoulder joint. Double spherical joint for shoulder joints enables wide workspace of both two arms.
JOHNNIE
Total 17 actively driven joints; weight - 49kg, height - 1,80m; each leg incorporates six driven joints; driven by brush DC-motors; joint angles and velocities are measured by incremental encoders two six-axis force sensors in the feet measure the ground reaction forces; an inertial measurement unit consisting of a three-axis accelerometer and three gyroscope sensors determines the spatial orientation of the upper body; PCI-I/O-board interfaces the main computer (Pentium IV 2,8GHz) with the sensors and motor drivers.
Denise
Denise stands 1.5 m tall, weighs 8 kg, and walks with a velocity of 0.4 m/s. There are five internal degrees of freedom; two ankles, two knees, and one hip. The hip joint consists of a bisecting mechanism which links the two legs to each other; if one leg is moved forward, the other moves the same amount backward. The ankles and knees are completely passive, except that the knee is provided with a controllable latch.
BARt-UH
Size: approx. 1,30 m Weight: approx. 25 kg 13 active joints with Harmonic-Drive gears DC-motors with ratings from 60 W to 150 W Measurement of joint absolute angles by sampling Gray-Code-stripes with line cameras Sensors: four force sensors in each foot, one inertial measurement unit in the torso Power electronics with DSP, connected via CAN-bus External main controller: PowerPC with 1 GHz, connected via CAN-bus External power supply with 30 V
Dexter
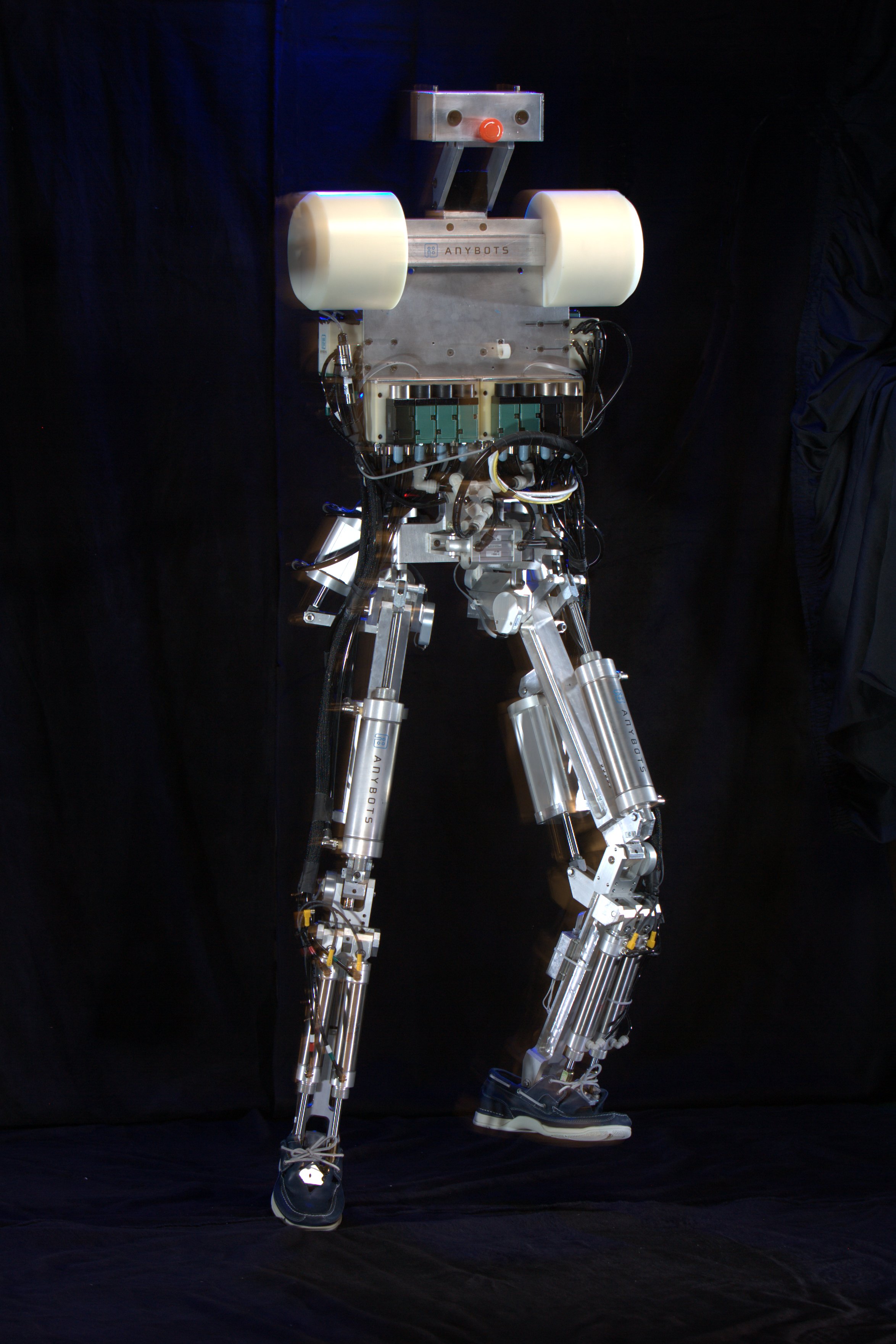
Dexter has two legs, stands 1,7 m tall, and weighs 61 kg. Unlike other biped robots that use ZMP walking algorithm, Dexter has a different, more human-like body on which ZMP control does not work. Its joints, driven by air cylinders, are springy and flexible like human muscle. Dexter walks and balances the same way humans do, even wearing the same shoes humans wear. Dexter can walk just as easily on soft surfaces, as on hard surfaces. Because its joints are flexible and able to absorb impact, it will be able to run at high speed over uneven ground and jump over obstacles.