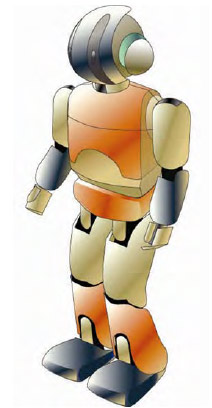
ASIMO
(2011)
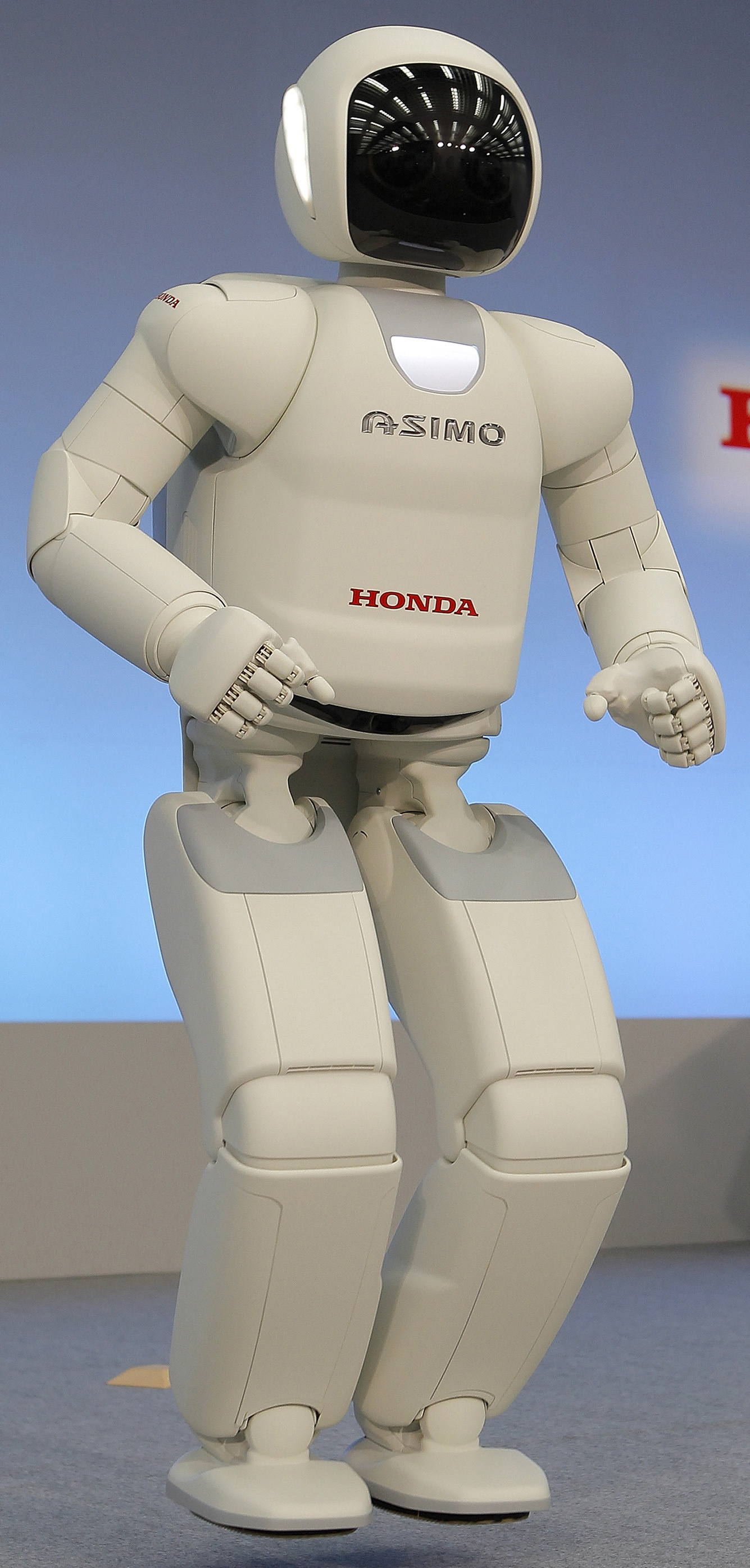
November 8, 2011 Honda Motor unveiled an all-new ASIMO humanoid robot, equipped with the worldÆs first autonomous behavior control technology. ASIMO can now continue moving without being controlled by an operator. At the the development process, the following three factors were identified as necessary for a robot to perform as an autonomous machine:1) high-level postural balancing capability which enables the robot to maintain its posture by putting out its leg in an instant, 2) external recognition capability which enables the robot to integrate information, such as movements of people around it, from multiple sensors and estimate the changes that are taking place, and 3) the capability to generate autonomous behavior which enables the robot to make predictions from gathered information and autonomously determine the next behavior without being controlled by an operator. With these capabilities, the all-new ASIMO takes another step closer to practical use in an environment where it coexists with people.
see also Asimo v.2007 and Honda Press Release
2
HUBO-2 (KHR-4, Jaemi)
(2009)
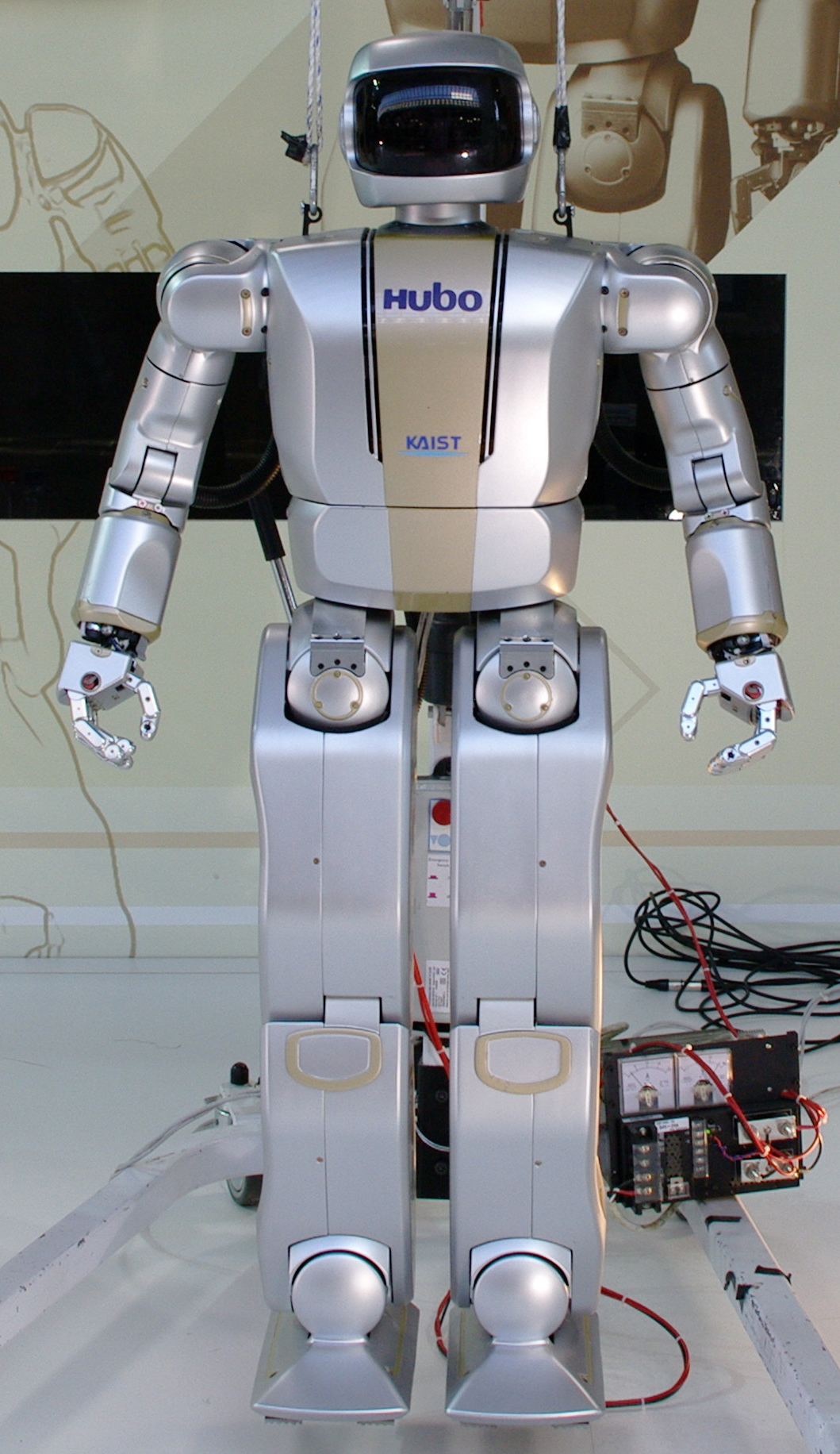
The height of HUBO-2 is 130cm and weight is 45kg. It has totally 40 DOFs (12 in lower body, 1 in waist, 14 in two arms, 10 two hands, and 3 in neck). It is able to walk with less energy consuming by stretching its legs and the walking speed is 1.4km/h. It can also run up to 3.3km/h. Remarkably shape-adapted fingers mechanism is applied on its hands. So it can wrap an object like a human's fingers. It can also do hand shaking, dancing, and tai-chi.
see HUBO 2 manual there
HRP-2 Promet
(2003)
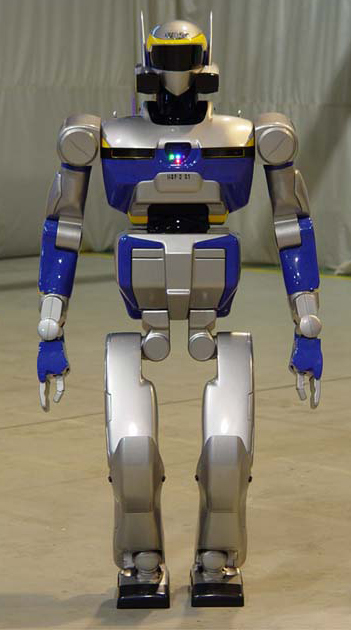
Total height - 1540 mm; total width - 620mm; mass (including batteries) - 58kg; degrees of freedom - 30 axes; walking speed - 0~2km/h; hand grip - 2kgf (per hand); sensors: joints - incremental encoders, vision - 3-eye CCD stereo cameras; torso - 3-axes vibration gyro 3-axes velocity sensor; arms - 6-axes force sensors; legs - 6-axes force sensors; motor drivers - 48V 20A(I max) 2axes/driver x 16; power system - NiMH Battery DC 48V 14.8Ah. Kawada Industries will start renting HRP-2 and its users will be able to develop their own software.
4
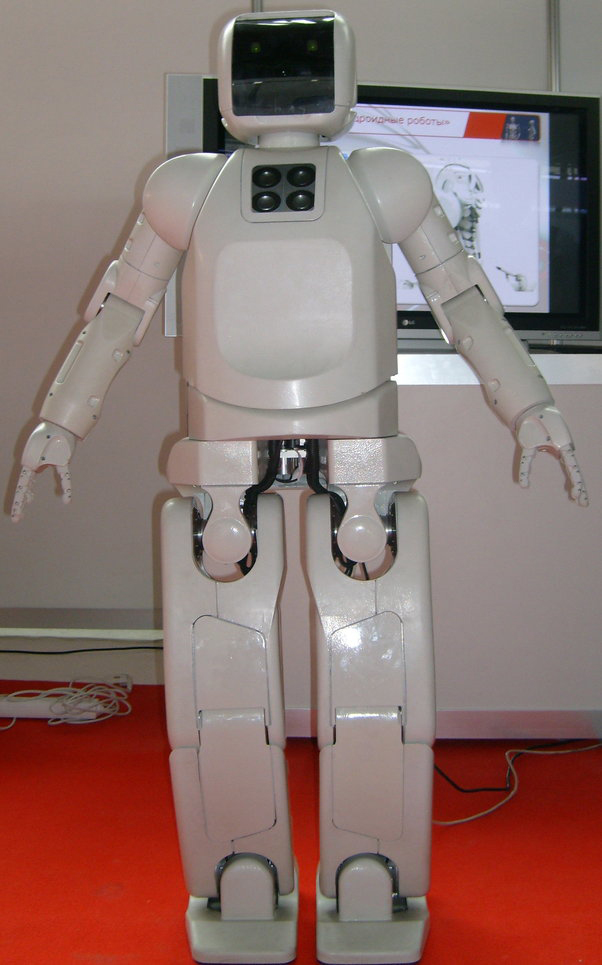
MAHRU III
(2007)

Biped humanoid robot Mahru III (150cm, 62Kg) developed in 2007. The ultimate goal of this project is to design biped humanoid robots connected to a wireless network environment so that they can be used in our daily life. Walking control algorithm is realized to make stable walking on an uneven floor possible. The experiments of the first phase shows that humanoid can walk at 1.3 km/h and overcome 1cm protrusions successfully.
5
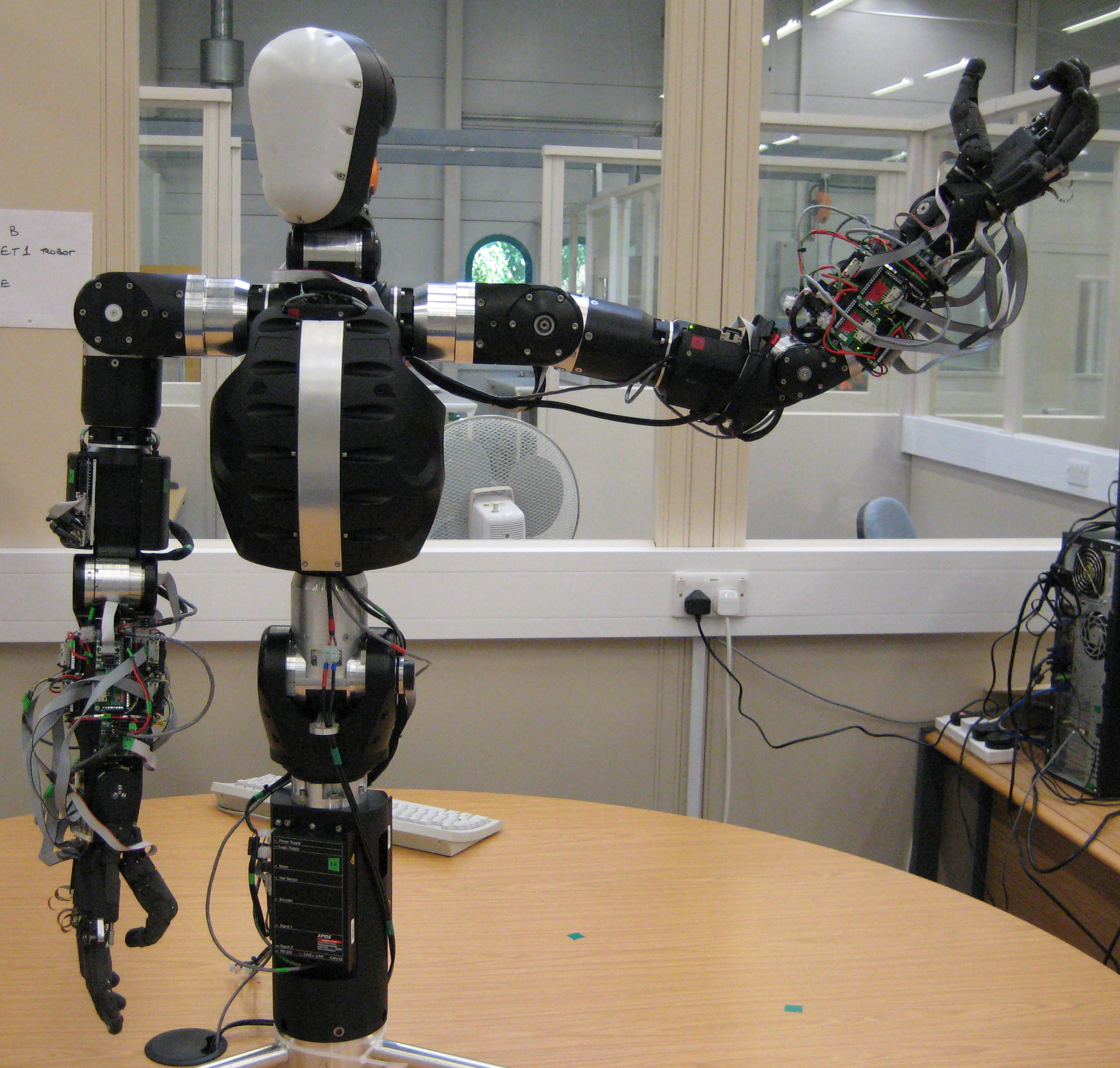
REEM-B

REEM-B can speak with people and accept voice commands, recognize faces and remind appointments as a secretary. All these features, including the large battery autonomy, makes REEM-B unique in its type. Weight - 60 Kg, height - 1,47 meters; degrees of freedom 51; autonomy (batteries) - 2 hours; maximum payload - 12 Kg per arm; main computer: Core 2 Duo at 1.66 Ghz; sensors: tilt sensor (six axis), force/torque sensors, stereo camera, 3D RangeFinder, additional stereo camera on the chest, microphone, ultrasonic sensor, laser range finder.
Advanced humanoids
1
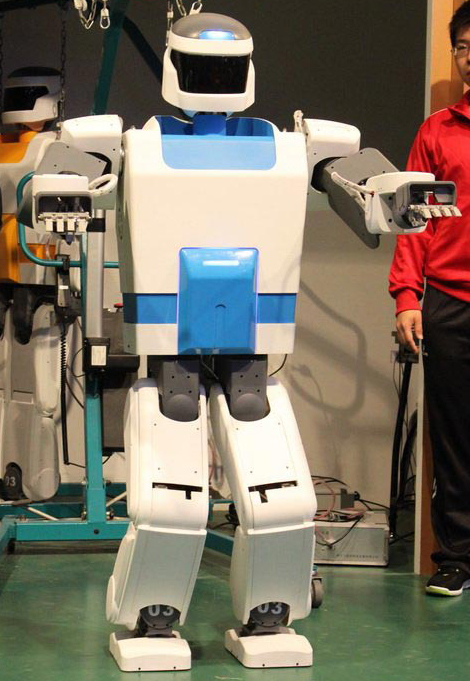
HRP-4
(2010)

Humanoid robot HRP-4 stands 150cm tall and 39kg weighs including its battery. It has a total of 34 DOFs (neck x2, 2 arms x7 [shoulder x3, elbow x1, wrist x3], 2 hands x2, 2 biaxial hips, 2 legs x6) and has a grasping force of 0.5kg. The robot runs Linux and AISTÆs proprietary OpenRTM-aist control software, and its backpack has room for a small laptop computer which can be upgraded whenever necessary. The robot responds to voice commands, and shows off its face and object recognition (pink balls).
HRP-3Promet Mk-II
(2007)

The Promet Mk-II has the ability to grasp tools in its three-fingered hands, and used an electric drill during its demonstration. It has 5 cameras inside its head, along with its laser range sensors. The robot is fully rain and dust-proof, has anti-slip ZMP control for walking on slippery surfaces, and has a 48V Ni-MH battery with a life of 60 to 120 minutes depending on conditions. It stands 160cm tall, weighs 68kg (including battery), and has 42 degrees of freedom (neck x 2, waist x 2, arms 7 ū 2, leg 6 ū 2, Hand 6 ū 2). That is 12 DOF more than the HRP-2 Promet.
3
HRP-3P
(2006)

Total height - 1540 mm; total width - 620mm; mass (including batteries) - 58kg; degrees of freedom (DOFs) - 30 axes; walking speed - 0~2km/h; hand grip 2kgf (per hand); sensors: joints - incremental encoders; vision - 3-eye CCD stereo cameras; torso - 3-axes vibration gyro 3-axes velocity sensor; arms - 6-axes force sensors; legs - 6-axes force sensors; motor drivers - 48V 20A(I max) 2axes/driver x 16; power system - NiMH Battery DC 48V 14,8Ah
see more: HRP-3P control system and HRP-3P right hand device
4
WABIAN-2R
(2006)
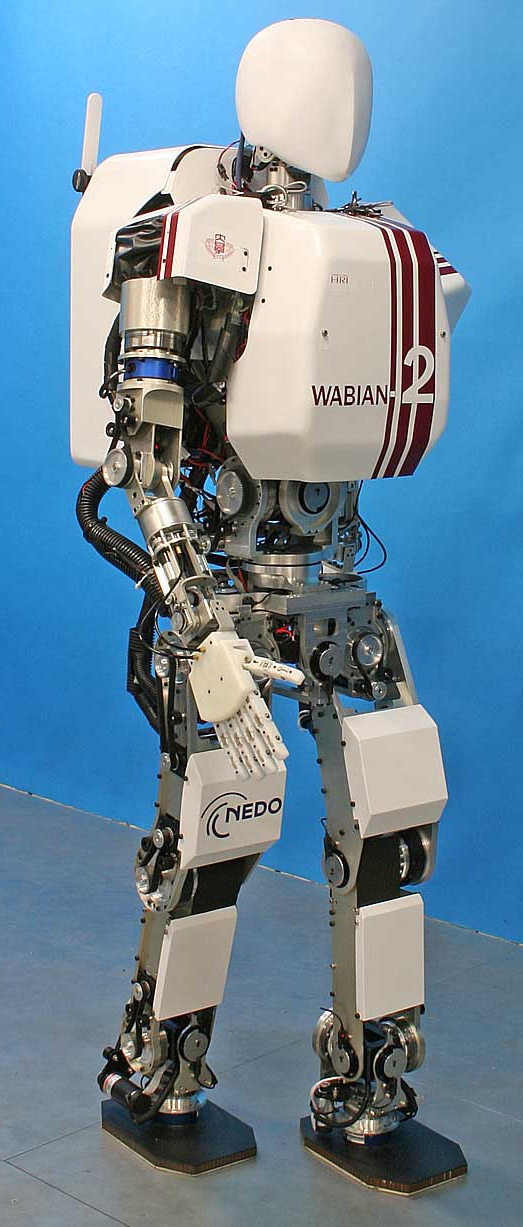
Height - 1475 mm; weight - 67.5 kg with batteries, 63 kg without batteries; DOF: leg - 6x2(active) + 1x2(passive); waist - x (active); trunk - 2(active); arm - 7x2(active); hand - 3x2 (active); neck - 3 (active); total - 39 (active) + 2(passive); sensors: 6-Axis Force/Torque; sensor; photo sensor; magnetic encoder; actuators - DC Servo Motor; reduction mechanism: harmonic drive gear; timing-belt/Pulley; batteries: Ni-H Battery.
5
KOBIAN
(2007)
The android KOBIAN integrates features of two previously developed robots Ś the WABIAN-2 bipedal humanoid and the WE-4RII emotion expression humanoid Ś into a bipedal machine that can walk around, perceive its environment, perform physical tasks, and express a range of emotions. The robot also features a new double-jointed neck that helps it achieve more expressive postures. KOBIAN can express seven different feelings, including delight, surprise, sadness and dislike. In addition to assuming different poses to match the mood, the emotional humanoid uses motors in its face to move its lips, eyelids and eyebrows into various positions.
6
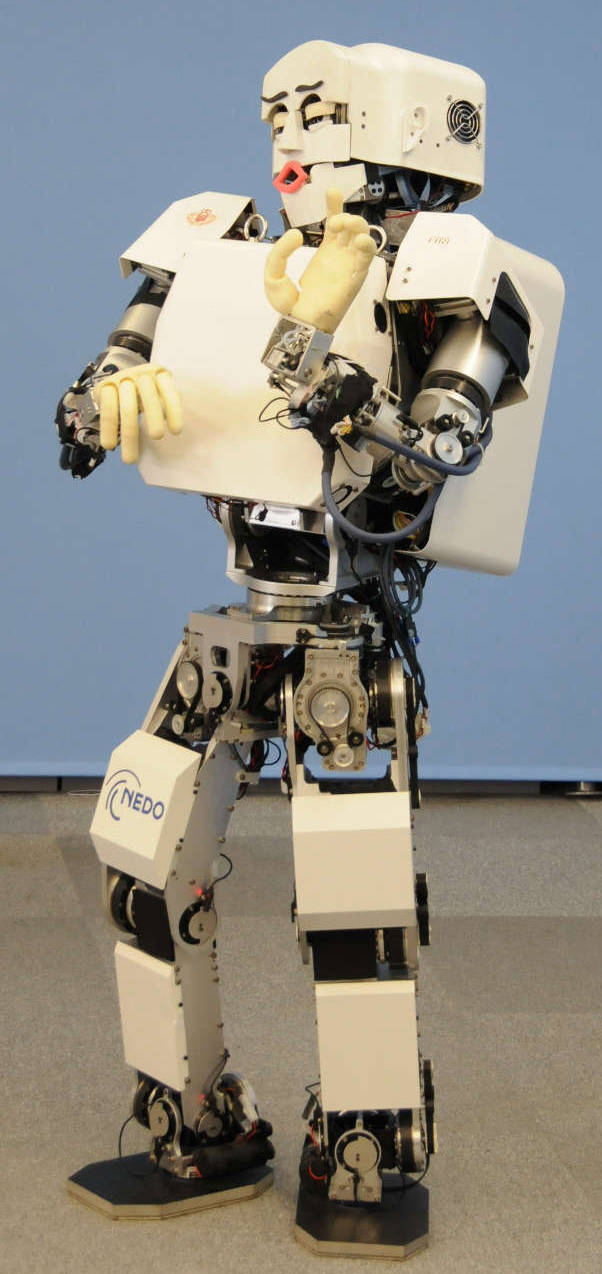
Walking Trumpet
(2005)

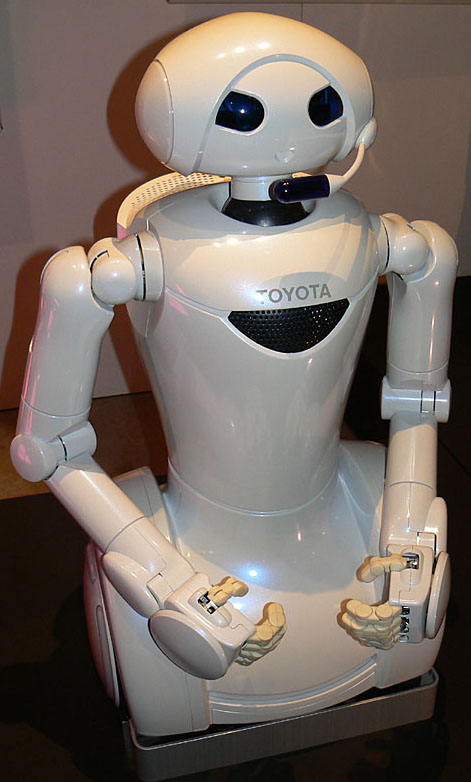
TOYOTA MOTOR CORPORATION (TMC)
The partner robot designed to function as personal assistants for humans. The robot walks on two legs similar to a person, making it easy to become accustomed to. It is able to use its hands to carry out a wide variety of tasks. Height 120cm; weight 40kg (with a musical instrument), DOFs - 31.
7
Mahru-R

A specialized anthropomorphic robot hand which can be attached to the biped humanoid robot MAHRU-R in KIST, has been developed. This built-in type hand consists of three fingers and a thumb with total four DOF where the finger mechanism is well designed for grasping typical objects.
Toyota Violin-playing Robot
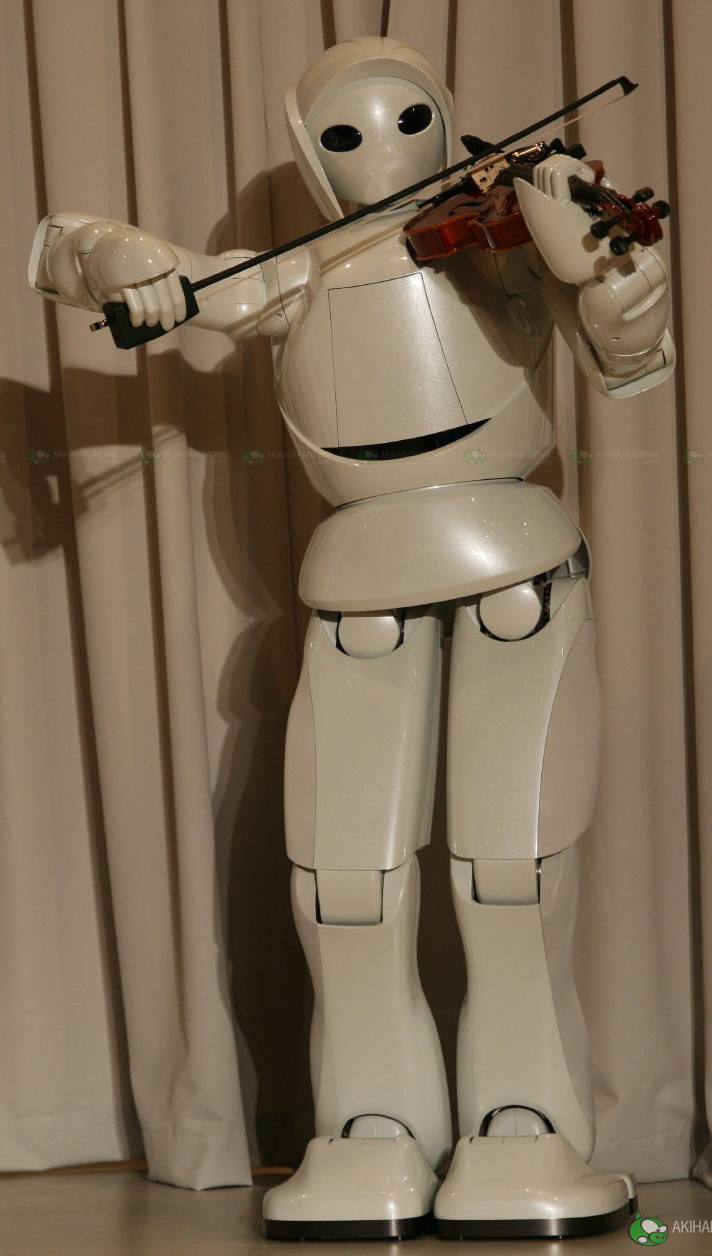
Easy-to-become-familiar-with bipedal robot, capable of performing a variety of tasks with its hands and arms. Able to achieve dexterous, human-like hand movement and arm strength when playing the violin. Advancing further development of hand and arm flexibility in order to be able to use general purpose tools. Height - 1,522mm, weight - 56kg.
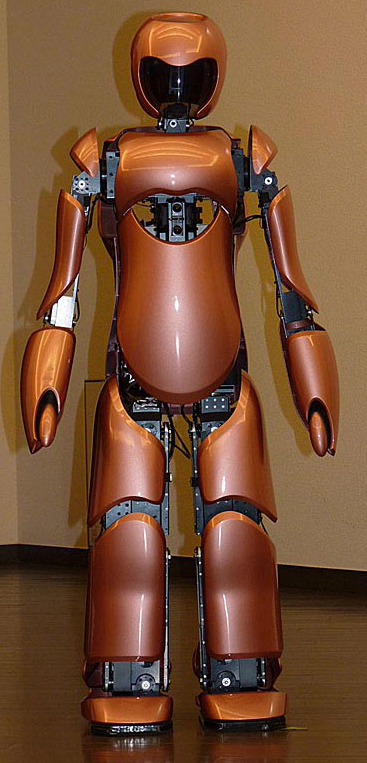
HRP-4C

The robot packs 42 motors, at just over 158 cm tall and 43 kg in weight, she's still thin enough to guilt teenage girls everywhere into puking up their lunches. And the manga-inspired face, with a tiny nose and large eyes, should keep the plastic surgery market afloat in even the most dire economic climate. Unlike modern models, however, the HRP-4C walks down the runway with constantly bent knees and it fully capable of smiling.
Nagara-3
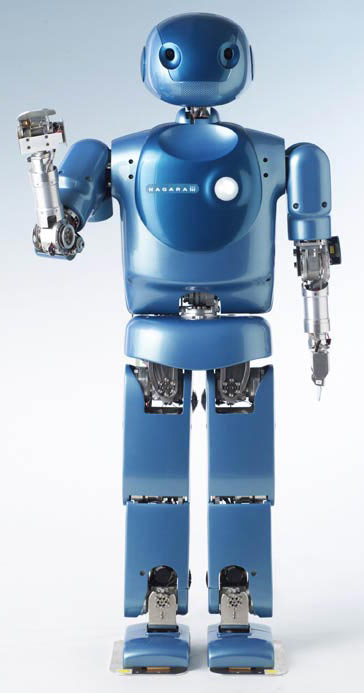
The robot stands 110cm tall, weighs 25kg, and has 29 DOF (6 per leg, 6 per arm, 2 in waist, 2 in neck, 1 in head), with a battery life of 30 minutes. Nagara3 is able to detect human motion by the relative positions of the head and hands and copy the movements with its own arms. It was also capable of estimating the position of the soccer ball in relation to itself (initially robot was created as soccer).
e-NUVO
The e-NUVO stands 126cm tall and weighs 15kg, with 21 DOFs (2 legs x6, 2 arms x3, head x3), powered by a Lithium Ion battery. It is equipped with the cameras, accelerometers, gyro sensors, obstacle detection sensors, distance sensors, and piezoelectric sensors, and can be controlled via PC or remote controller. The robot will be programmed using Microsoft Robotics Developer Studio.
Atom

ATOM (Advanced Technology for Optimizing Motion) is a full-sized bipedal robot that stands 157.2cm tall and weighs 72kg. It has an impressive 49 degrees of freedom (2 legs x7, 2 arms x6, 2 hands x5, torso x3, head x10), stereo vision, gyros and accelerometers, and runs Windows 7 and XP on a pair of Intel Atom chips. The robot will have some degree of speech recognition and image processing, and could be used for telepresence.
SURENA II
(2010)

SURENA is a humanoid robot which has been developed and fabricated through a joint project between The R&D Society of Iranian Industry, Mine & Commerce and Center for Advanced Vehicles (CAV) at University of Tehran. SURENA project is enhancing the ability to design robots that walk on two legs, under a feedback control system that provides dynamic balance, yielding a much more human-like motion. SURENA II is equipped with various sensors such as gyroscope and accelerometers which provide stable motion. A Multi-Input Multi-Output (MIMO) control system is employed to provide a smooth walk. SURENA II is a humanoid robot that balances itself and walks freely. The robot has the shape and size of a standard human, making it the first anthropomorphic robot in Iran that moves dynamically like a real human. The robot stands 145cm tall and weighs 45kg. It has a total of 22 degrees of freedom (2 legs x6, 2 arms x4, neck x2). Speech and vision development are on the way in the next generation of SURENA. Presently, SURENA team is working on the development of a more advanced version of SURENA with a faster maneuverability and higher level of machine intelligence suitable for various industrial, medical and household applications.
CHARLI
(2011)

CHARLI is the United States' first full-size autonomous humanoid robot. It's mechanical design has allowed experimentation into the effects of different mechanical configurations, mostly in the legs, on the performance of bipedal walking and balancing. CHARLI is capable of walking in all directions as well as turning, kicking, and performing gestures and simple upper body manipulation tasks. CHARLI is also designed to participate in the autonomous robot soccer competition, RoboCup, in the Adult size league. CHARLI implements an impressive active stabilization strategy based on sensory feedback (filtered IMU angles, gyro rate readings and proprioception information based on joint encoders) Stabilizing torques at the ankle joints are applied successfully rejecting external disturbances. The robot height is 1.41 m, total mass 12.1 kg, walking speed up to 1.4 km/hr, the total DOFs 25, total actuator count 32.
NASH
(2011)

Nash robot, which stands for NTU Advanced Smart Humanoid, is 1.8m tall and is touted to be one of the world's tallest smart robots. Constructed from lightweight aluminum and covered by hardy plastics, NASH is able to gesture, walk, climb stairs, follow verbal instructions and recognize objects such as apples and cups. It can carry up to 40kg worth of payload on its torso, and hold up to 10kgs per arm and is able to resist being pushed and pulled from different directions. He can walk forward, backward, sideways, up stairs, down stairs, turn left, turn right, squat in position, walk on uneven ground. NASH also has the mental smarts to match its physical abilities, capable of making decisions based on the information it gathers, is responsive to human languages and understands instructions rather like a dog. The robot equipped with 1000 watt lithium-ion battery, provided him two hours operation time in average.
BHR-5
(2012)

The new China robot BHR-5 proved the ability to play ping-pong. A pair of robots use four cameras and a high-speed image processing program to detect the trajectory of the ping-pong ball within 0.3~0.4 seconds. The pair rallied back and forth a dozen times, and played against human opponents, and have successfully rallied 200 times without missing a beat. This model stands 162 cm tall, weighs 63 kg, and has a total of 32 DOFs. The BHR-5 looks quite a bit like the BHR-2, which performed a sword dance back in 2005. this android has a fully-actuated body, allowing it to stand up and perform tai chi exercises. It also participated in simple conversation with attendees thanks to speech recognition and speech synthesis. When asked, ōWhat do you like to eat?ö it replied, ōWe robots do not need to eat.ö
Kibo 2.0
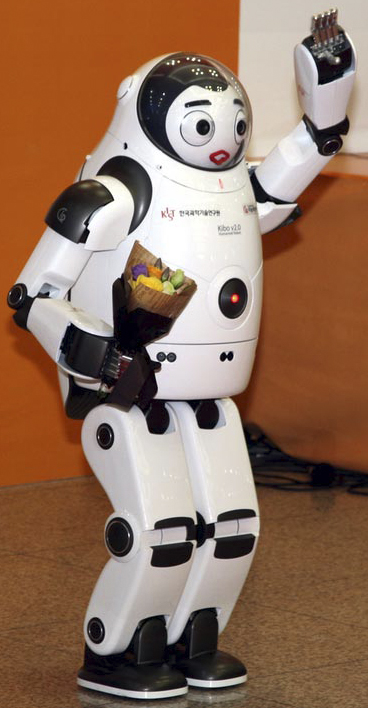
Center for Intelligent Robotics (KIST)
The Kibo 2.0 robot stands 120cm tall and weighs 48kg, with 43 DOFs in its body and face. It has ultrasonic range finders around its belly, navigates using ceiling-mounted cameras, and reportedly has interactive voice recognition capabilities. The Kibo robots are easily identified thanks to their expressive faces (complete with moving eyes, eyelids, and lips), which most other small robots do not have. It walked on stage holding a bouquet of flowers, made faces at the crowd. The robotÆs creator, Dr. Munsang Kim, stated that while some of KoreaÆs robots have focused on walking and climbing, Kibo will test how people react to the robotÆs appearance and expressions. The goal is to develop a robot that can communicate seamlessly with a human.
Roboray

Samsung's robotics division presented the company's latest humanoid robot, Roboray, is a departure from their earlier robot Mahru, thanks to its torque controlled leg joints, which give it more human-like walking capabilities. On the surface, the Roboray looks quite a bit like the Mahru 3, but the Mahru series has never shown the ability to run like some of its competitors. At a height of 150 cm and a weight of 62 kg, it's a full-size humanoid robot with 32 joints (not including its fingers). The team has already begun developing face and speech recognition software specifically for the robot. Roboray's legs are powered by a combination of harmonic drive actuators and compliant tendon-driven actuators, all of which are torque controlled. The compliant joints are used in the hips, knees, and ankles, and have a certain amount of give that can be tightened or relaxed. Unlike earlier robots that walk with bent knees, the compliant joints can absorb impacts, which give it a more natural and energy efficient walking gait.
read more: balansing control, 3D vision system and lower limbs design Roboray robot
Wheeled robots
TWENDY-ONE
(2007)
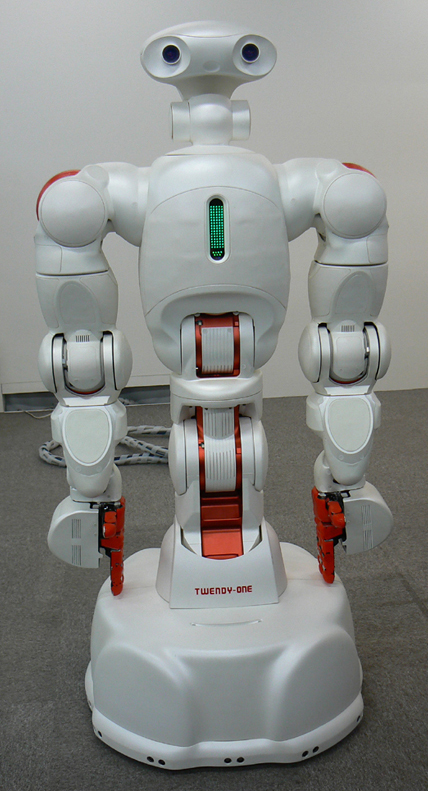
WASEDA University Sugano Laboratory TWENDY team
The size and the movable range of TWENDY-ONE arm and hand are designed equally to those of the average adult female. The arm has 7 degrees of freedom with one redundancy and the four-finger-hand has 13 degrees of freedom in total to manipulate an object dexterously. As the mobility is an important rule of the service application, an omni-directional mobile mechanism is introduced to TWENDY-ONE. This mechanism enables the robot to easily follow and adapt to external and involuntary force applied from human. The trunk of WENDY-ONE has 4 degrees of freedom so that the hand can reach the floor to pick up an object and to wipe off the floor.
ARMAR-III
(2008)
ARMAR-III has 43 degrees of freedom (torso x3, 2 arms x7, 2 hands x8, head x7) and is equipped with position, velocity, and force sensors. The upper-body has a modular design based on the average dimensions of a person, with 14 tactile sensors per hand. Like the previous versions, it moves on a mobile platform. Robot use the Karlsruhe Humanoid Head, which has 2 cameras per eye (for near and far vision. The head has a total of 7 degrees of freedom (neck x4, eyes x3), 6 microphones, and a 6D inertial sensor.
AR (Assistant Robot)
(2008)

Robot is about 1.6 meters tall and weighs 130kg. It has 32 degrees of freedom - 3 on the neck and head, 7 on both arms, 6 on each hands, 1 on the hip and 2 on the wheels.1. It can recognize the environment by combining the data from its laser rangefinder and stereo camera. 2. It can create motions based on a 3D geometric model. 3. It can visually determine whether its task was successful or not, and if not, it can try again.
SmartPal 5
(2007)
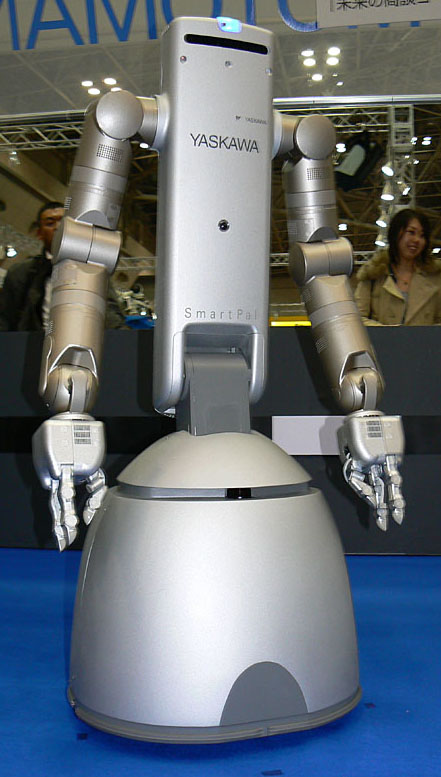
SmatrPal 5 is a service robot intended for non-manufacturing industry. Overall height 1325 mm. Robot can move around at speeds of up to 3.6 kilometers per hour, has two arms to grab and carry objects. With 7 joints, having one additional arm compared to general industrial robots, flexible operations similar to human arms are produced. A one-joint gripper or a multi-fingered hand consisting of 3 fingers and 9 joints can be mounted. Robot can recognize voice by microphone input and have simple conversations with users through speech synthesis by speaker output. By matching images of the CCD camera, which is built into the body to the predetermined images, it can detect where the object it is going to grab is placed.
SeRoPi
(2006)
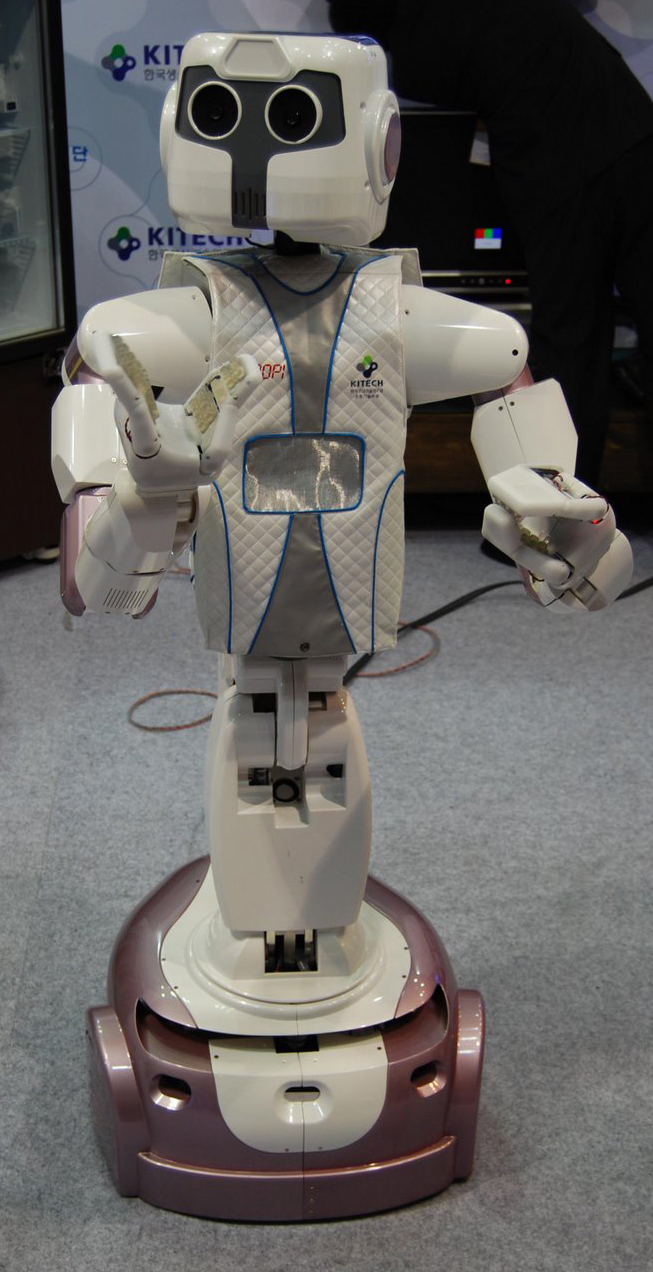
SeRoPi stands 125cm tall and weighs 60kg and has 25 degrees of freedom (neck x3, waist x3, knee x1, two arms x6, two hands x3). The robotÆs modular arms feature KITECHÆs own proprietary actuators, and it features an automatic charging utility in its base for convenient recharging.
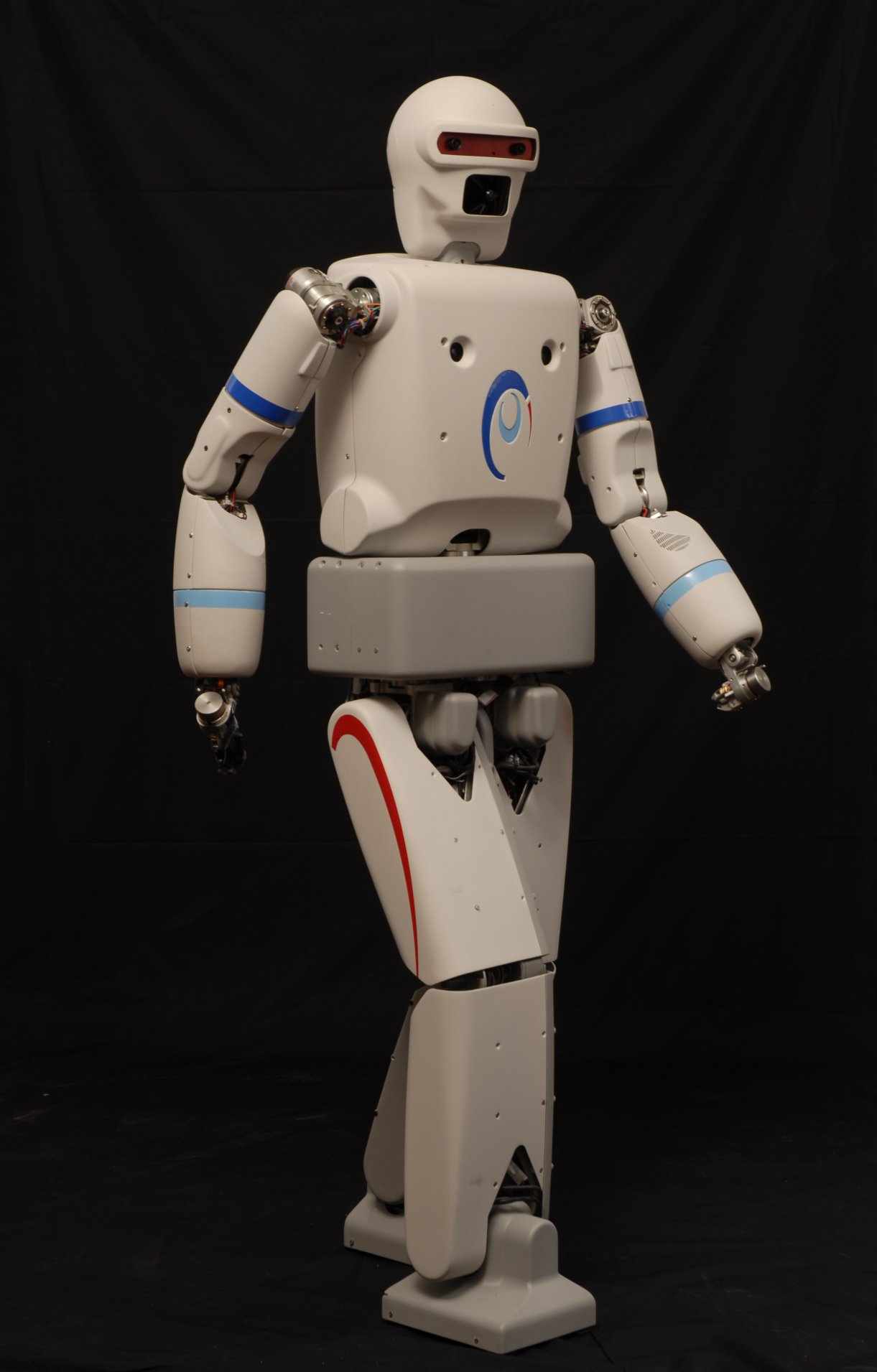
REEM-H2
(2009)
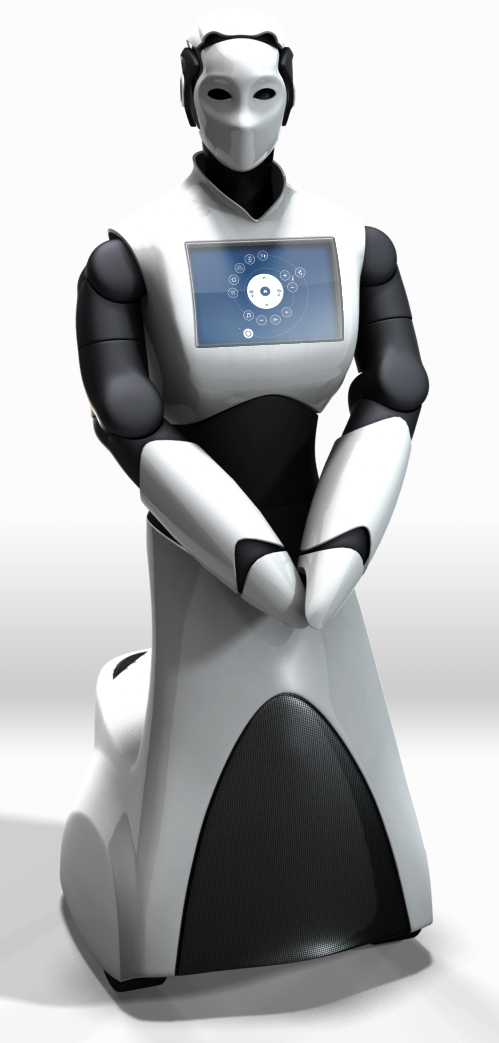
REEM-H2 can be used for several purposes. Thanks to its autonomous navigation system, its user-friendly touch screen, and its voice and face recognition system, robot can find its way in various surroundings and help or entertain people in most public environments. REEM-H2 can also transport small packages, and its dynamic information point can be used with a wide variety of multimedia applications: display an interactive map of the surrounding area, call up a variety of information (weather, nearby restaurants, airlines travel time, etc), offer tele-assistance via video-conferencing.
TUBO
(2009)

TUBO (Tungmyong U + roBOt) has stereo cameras for face recognition; character recognition (reading); Korean speech recognition and synthesis; and SLAM. It moves on two wheels and has two manipulators. The university is using it to research human-robot interaction with plans to develop a household assistant.
T-ROT
(2009)

T-Rot [Thinking Robot] is an intelligent service robot with manipulation capability. Overall height 1,5 m. She recognizes uncertain surrounding environments, plan for tasks based on knowledge from the recognition, and execute behaviors such as navigation or manipulation. The robot has object, face, speech and gesture recognition capabilities enabling it to react to a personÆs commands. T-Rot consists of 4 Single Board Computers (SBCs), a two-differential-wheel mobile base, two 7-DOF manipulators, two 3-fingered hands, 2-DOF pan-tilt head, speech unit, battery and several sensors (e.g., laser range finder, infrared ray, sonar, encoder, camera, microphone, etc).
Tiro
(2010)

Robot Tiro will take up a permanent position at the Presidential residence, where it will give tours and relate KoreaÆs cultural heritage. Tiro speaks in a sweet, feminine voice in Korean, Japanese, Chinese, and English. The robotÆs shape was based on a beautiful maiden in traditional Korean dress.
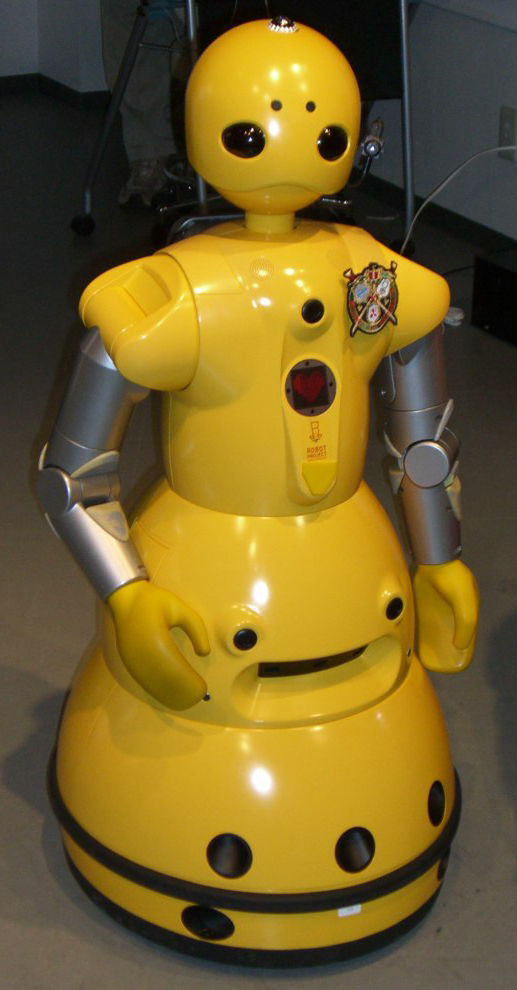
FURO
(2010)

A restaurant service robot FURO (Future Robot) is capable of expressing attractive human emotions. It has a variety of sensors which are used to detect when a person approaches and for obstacle avoidance. It comes with a large adjustable touch screen, which allows customers to choose from the restaurantÆs menu, and payment can be handled on the spot by swiping your credit card. The height of FURO is 1,6 m, weight 75 kg.
PHOPE
(2007)

The PHOPE (PIRO + Hope) robot was designed to guide visitors around structured environments, such as buildings, so it has face and speech recognition as well as speech synthesis, which allows it to remember specific people. For example, you would register yourself in the robotÆs database and on the 2nd visit to the PIRO building, the robot might greet you by name upon recognizing your face.
RobovieR3
(2010)

The RobovieR3 stands 108cm tall, weighs 35kg, and has 17 degrees of freedom (eyes x4, neck x3, 2 arms x4, 2 wheels). The robot has 11 tactile sensors throughout its body. It is equipped with 2 USB cameras for eyes, 2 mono microphones for ears, a speaker for a mouth, and can be equipped with a laser range finder in its base for obstacle detection. It will also communicate with a local network which includes other robots, cameras, and mobile phone services.
Wakamaru
Mitsubishi Heavy Industries, Ltd.
Wakamaru is able to understand 10,000 words common to daily life. He has face recognition technology which allows him to recognize 2 individuals in the household as his owners, as well as up to 8 other people, simply by looking at them. If you dislike the name Wakamaru, you can name him whatever you want and he will respond to that name. He can follow you around the house and has built-in collision detection sensors to avoid obstacles, people, or pets. The height: of robot is 100 cm, weight: 30 kg.
ENON
(2005)

The service robot ENON capable of providing guidance, escorting people, transporting objects, and security patrolling, thereby differentiating enon from other service robots on the market that are designed specifically for only a single task such as transporting, cleaning, or surveillance. The robot is 1,3 m tall, 50 kg weight, has 16 DOFs. Max speed is 3 km/hr.
EMIEW
(2005)
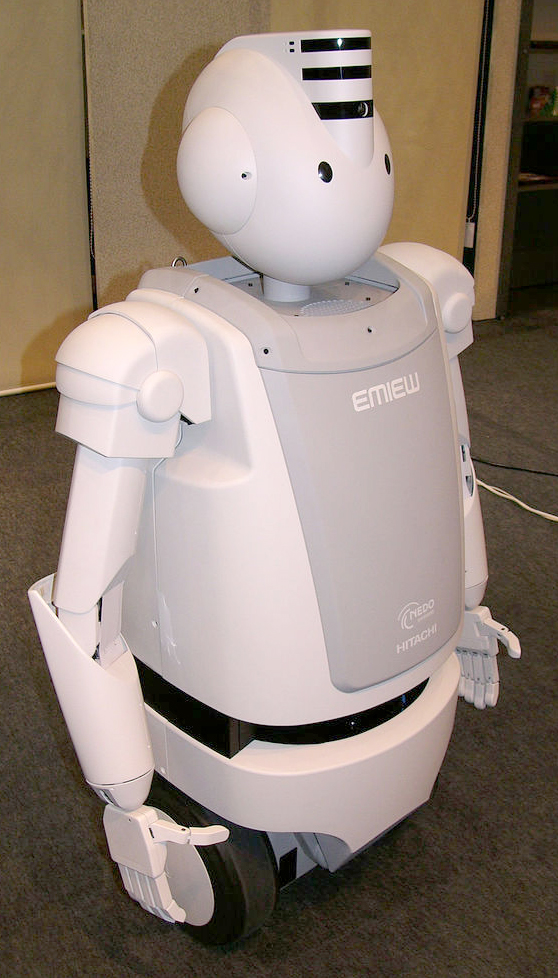
Height 130cm, weight approx. 70 kg, max. acceleration: 4 m/s2, max speed: 6 km/h, moves body around obstacles, dialog Interaction at 1 m (without microphone; simultaneously with facial recognition), detects sound direction from 360░around robot. Two arms: 6 degrees of freedom; hand: 1 degree of freedom.
RIBA-II
(2011)

RIBA-II, the new version of nursing-care assistant robot RIBA (Robot for Interactive Body Assistance), is 137cm tall, 82cm wide, and 103cm long, and weighs a hefty 230kg. Each arm has 7 degrees of freedom, its neck has 3 DOFs, its waist has 2 DOFs, with 3 DOFs more thanks to its omnidirectional base. A new version of the robot is even better at picking up and carrying bedridden patients of up to 80kg, which is 19kg more than the first RIBA could handle. Additionally the robot can to lift a patient from a floor thanks to introduction of a powerful new joint that lets RIBA-II bend deeply at the waist. It can then transfer the patient to a wheelchair (and back again). While carried in RIBA-IIÆs soft arms, a nurse can physically guide the robot by the arm thanks to its Smart Rubber sensors, which are the worldÆs first capacitive-type sensors made entirely from rubber. RIBA-II has them on its chest, upper arms, forearms, and hands. And patients need not worry about getting pinched in the arm joints thanks to a thick layer of soft rubber.
Care-O-bot 3
(2009)

The mobile robot assistant Care-O-bot 3 is able to assist humans in their daily life. As an interactive butler the robot is able to move safely among humans, to detect and grasp typical household objects, and to safely exchange them with humans. Care-O-bot 3 has an omnidirectional platform, with four steered and driven wheels. This kinematic system enables the robot to move in any desired direction and therefore also safely to negotiate narrow passages. The robot is equipped with a highly flexible, commercial arm with seven degrees of freedom as well as with a three-finger hand. This makes it capable of gripping and operating a large number of different everyday objects. The height is 1,45m, weight 180 kg.
TPR-Robina
(2007)

TPR-Robina stands 1.2m tall, weighs 60kg, and has 27 degrees of freedom. She moves on wheels at a maximum speed of 3.6km/h, using ultrasonic sensors in her trunk and a laser range finder in her base to detect obstacles. With these sensors Robina is able to plan a path through her environment in real-time, so that even if something unexpectedly blocks her path she can continue towards her destination. Toyota also developed a new three-fingered hand that allows the robot to hold a pen and skillfully sign her autograph. Speech recognition and synthesis give Robina the ability to hold a simple conversation.
DJ Robot Toyota
The DJ robot has the self-balancing two-wheeled body and unique headphone-shaped headpiece and microphone, and intended to talk with a human. It is 100cm tall, weighs 45kg, and has 21 degrees of freedom.
Snackbot

Snackbot is a mobile robot, about the size of a very small human, that rolls around on wheels, and will be delivering snacks to students, faculty, and office workers. Snackbot equipped with a laser range finder and cameras which will be used to research navigation, path-planning, and people/face detection in an office environment. The Snackbot currently has non-functional arms that hold a tray, used for carrying snacks. The tray is equipped with 12 load cells; each is capable of measuring a weight range of 13 to 763 grams. With this functionality, the robot will know when someone has removed or replaced a snack on the tray.
Mobile Humanoid Justin
(2008)

The mobile robotic system Justin with its newly developed mobile platform allows the long range autonomous operation of the system. The individually movable, spring born wheels match the special requirements of Justin's upper body during manipulation tasks. PMD sensors and cameras allow the 3D reconstruction of the robot's environment and therefore enable Justin to perform given tasks autonomously.
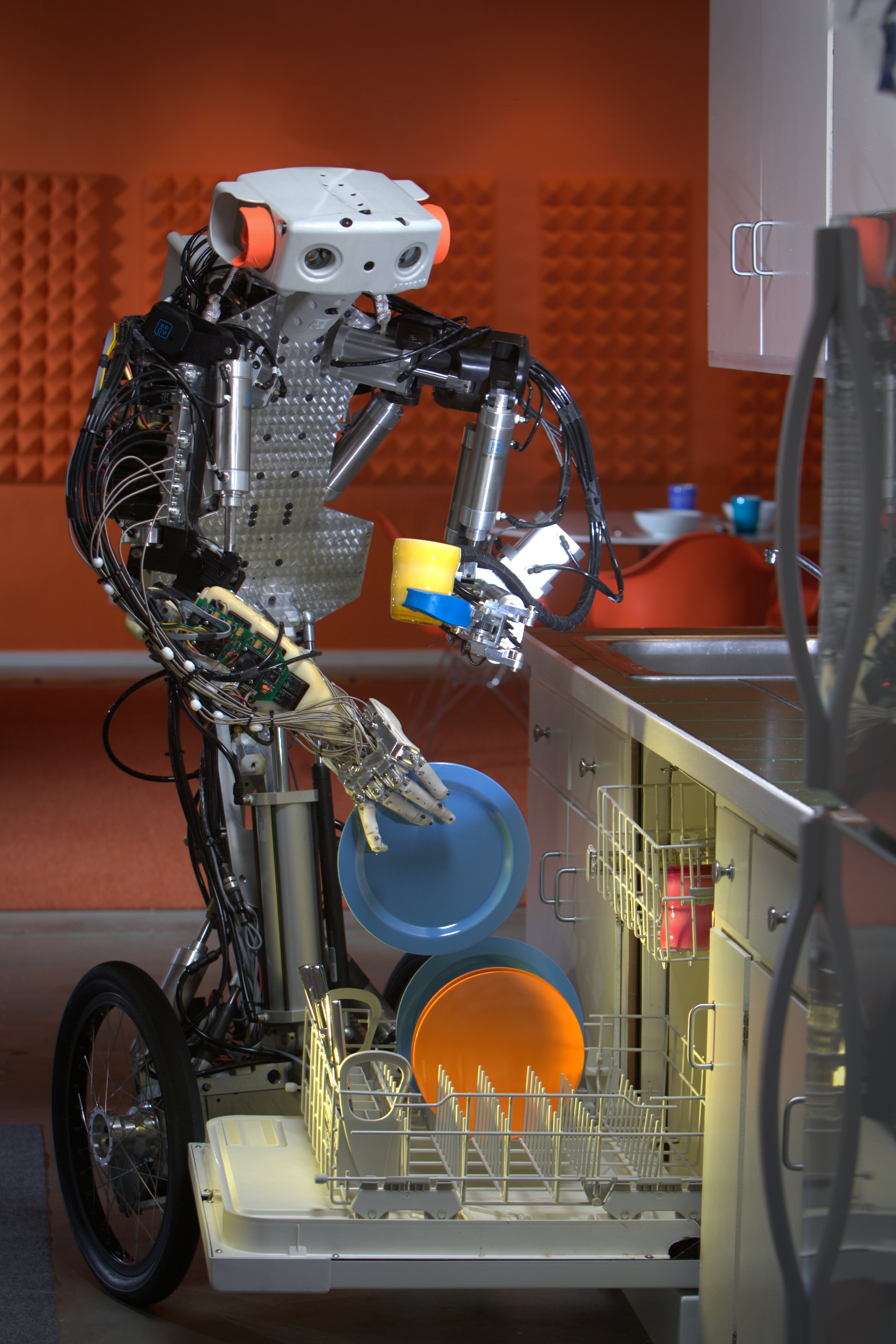
Cosero
(2010)
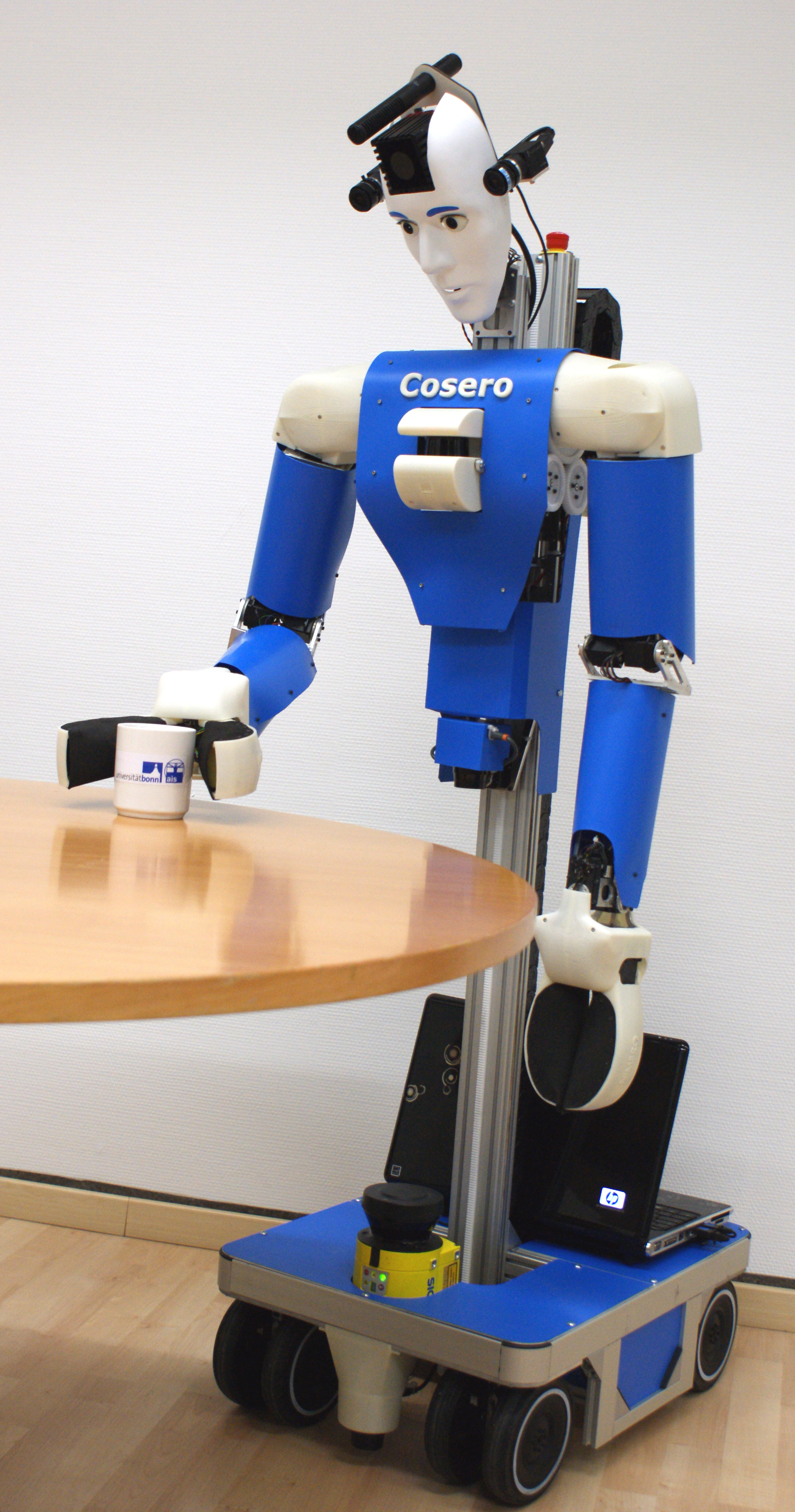
University of Bonn, Institute for Computer Science
Cognitive service robot Cosero became operational in fall 2010. Cosero has an eight-wheeled omnidirectional base (12 DOF), a movable trunk (2 DOF), two anthropomorphic arms (7 DOF each), and a movable sensor head (2 DOF). Its arms are twice as strong as the ones of Dynamaid. The robot is equipped with four laser scanners, two cameras, a time-of-flight camera, a directional microphone, and distance sensors in the hand.
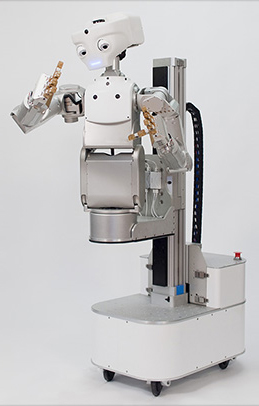
Dynamaid
(2009)

Domestic service robot Dynamaid has an eight-wheeled omnidirectional base (12 DOF), a movable trunk (2 DOF), two anthropomorphic arms (7 DOF each), and a movable sensor head (2 DOF). The base is equipped with a Sick S300 laser-range-scanner and a Lenovo X200 subnotebook. Its maximum payload is 20kg. Maximal speed is 0.5m/s. The robot is able to map indoor environments, to plan global paths, and to avoid obstacles. The anthropomorphic arm has 7 joints, which are driven by Dynamixel actuators. The arm is equipped with a 2DOF gripper. Its maximal payload is 1kg. The sensor head contains two FireWire-800 color cameras, a MESA SR4000 time-of-flight camera, and a directional microphone. The trunk is also equipped with a movable laser scanner.
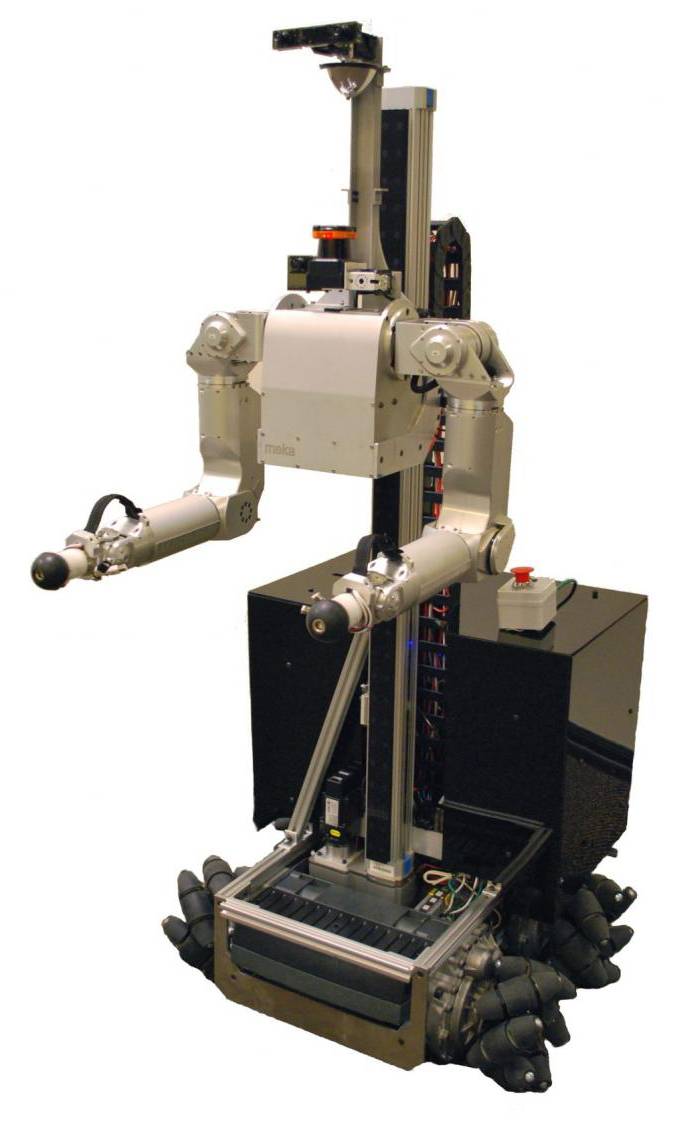
M1 Mobile Manipulator
The M1 Mobile Manipulator stands 126cm tall and weighs 165kg, with a 7-DOF head and 7-DOF arms. The robot is an integrated and customizable mobile manipulation platform. It features compliant force control throughout its body, a customizable sensor head, durable and strong grippers, and a small footprint omnidirectional base. The M1 has been designed for durable operation and rapid experimenation and development. It includes the M3 and ROS software stacks, including a KDL kinematics and dynamics descriptions, ROS URDF descriptions, ROS interfaces, and calibration-free startup for the upper-body.
Cody
(2010)
Cody consists of arms from MEKA Robotics (MEKA A1), a Segway omni-directional base (RMP 50 Omni), and a 1 degree-of-freedom (DoF) Festo linear actuator. One of our design considerations for human-centered robotics is to use robotic arms that have actuators with low mechanical stiffness. The arms consist of two 7-DoF anthropomorphic arms with series elastic actuators (SEAs) and the wrists are equipped with 6-axis force/torque sensors (ATI Mini40). The robot gather laser range data from a tilting Hokuyo UTM- 30LX and images from a Point Grey Firefly camera. Cody uses two computers running Ubuntu Linux and all software was written in Python. For all arm motions was used equilibrium point control (EPC) which is a form of impedance control inspired by the equilibrium point hypothesis. Using EPC, the motion of the robotÆs arm is commanded by adjusting the position of a Cartesian-space equilibrium point (CEP) over time.
pi4_workerbot
(2011)
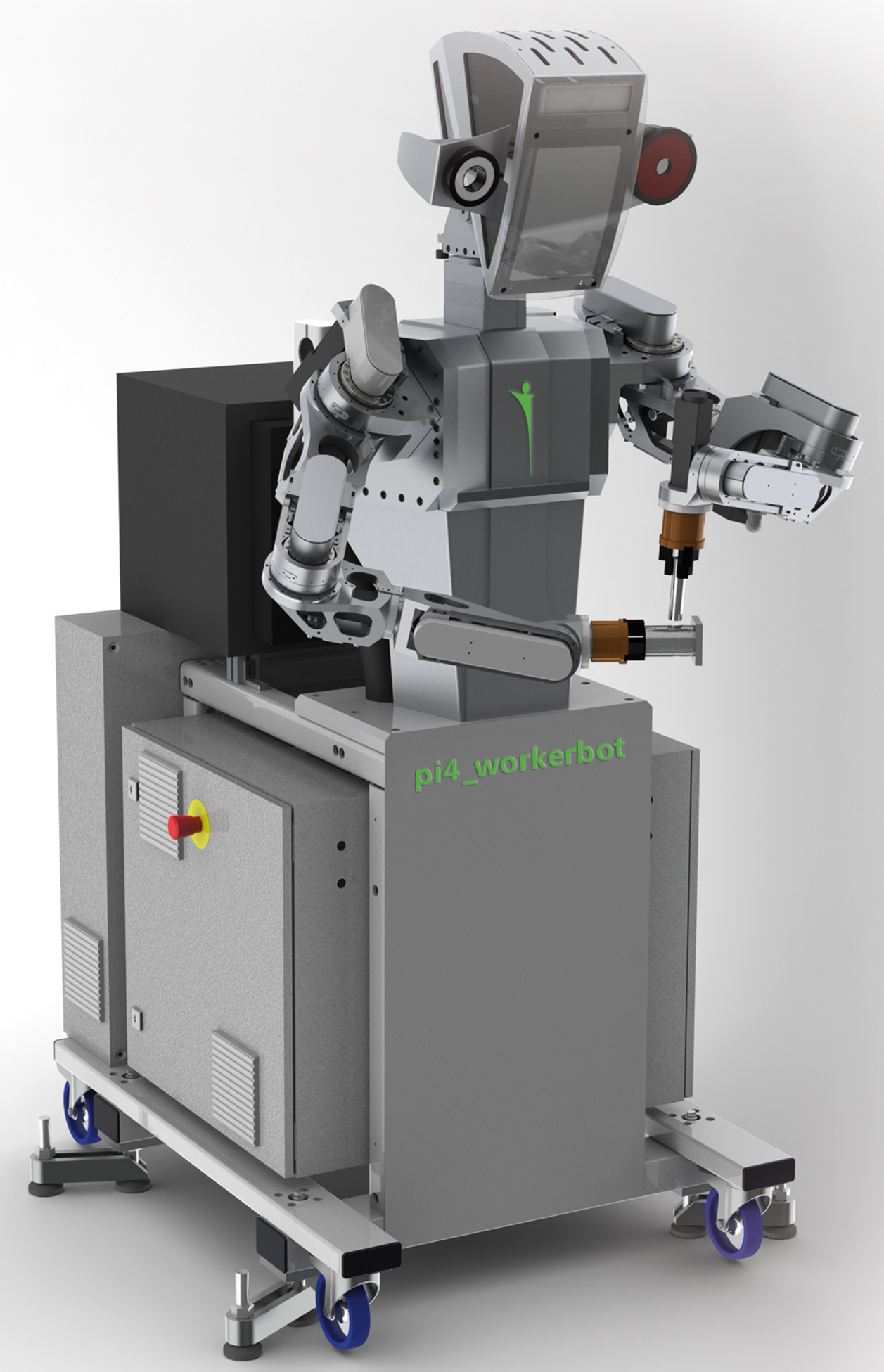
The robot can learn new tasks without needing to be programmed line by line. It has two 7 degree of freedom arms, which allow it to transfer an object from one hand to another, which is useful when examining the entire surface. Its manipulators boast ōfinger-tip sensitivityö, by which they mean with the correct settings the robot can hold an egg without cracking it. Its head is equipped with three cameras: a 3D camera observes its surroundings, while the other two can be used for detailed inspection tasks. The face has a screen which displays various emotional expressions (it will appear happy if it is busy working, but bored if it is waiting for its next job).
Luna
(2011)

RoboDynamics announced the introduction of Luna, worldÆs first personal robot designed for mainstream consumer adoption. Luna is a beautifully designed, human sized, open, and affordable personal robot for the price of a laptop. Luna is the first robot to feature a native App Store, standard PC architecture, an open Linux based operating system, touch screen display, Wi-Fi, and multiple tactically located standard USB based expansion ports for infinite expandability. ItÆs got the necessary camera, microphone, speakers, and 8″ touch screen for holding live video conversations (defaulting to a cute emoticon face). Moving on a stable wheeled base and operating for up to 4 hours per charge, LunaÆs slender 157cm frame weighs only 30kg. With a helping of PrimeSense 3D sensor Luna capable to decent navigation and obstacle avoidance. Its adjustable arms can carry a meal tray or other light objects, so Luna can serve as a restaurant waiter. With similar software, it could even serve as a mail delivery robot, stopping at your desk or cubicle when youÆve got mail. Maybe someone will duct-tape a broom to it and have it sweep their floor.
Eliza
(2010)

A service robot Eliza uses speech recognition and speech synthesis to welcome shoppers or hold simple conversations with people using natural spoken language in Chinese. For example, some children ran up to the robot and immediately began asking questions ¢ ōWhat is your name? I like to eat fruit!ö to which it responded, ōMy name is Eliza and I come from Beijing. Robots canÆt eat fruit, but I like apples.ö The robot stands 1,50 m tall and weighs 50kg with 4 degrees of freedom per arm and 2 in its neck. Eliza has big eyes, and its eyelids and mouth can open and close, giving it a cartoon-like appearance. It moves at speeds up to 1 m/sec on its 2 wheels, and can move forward, backward, and turn. It is controlled remotely over a wireless connection. Eliza comes equipped with 10 infrared sensors for simple obstacle avoidance and safety, and its batteries last approximately 2 hours.
HuiHui
(2010)
The HuiHui robot, developed as part of the Knowledge Innovation Project (launched in 2009), is a multi-purpose robots for the home, nursing homes, and hospitals that can provide daily living assistance, mental health benefits, safety monitoring, and other services. HuiHui stands approximately 170cm tall, moves on an omnidirectional base, and has two arms (each with five-fingered hands), to fetch objects for its master upon voice command. The robot grasped and delivered a glass of water and poured a cup of tea in front of thousands of spectators at the expo. It has three types of entertainment functions, allowing it to play music or a game of checkers, and dance. It can also join in the morningÆs tai-chi exercises. It comes equipped with a laser range finder on the front of its wheel enclosure, and a ring of ultra sonic range finders around its base. The robot keeps track of its patient thanks to a special pair of shoes that have sensors in them that can detect if they fall down. The robot will ask if they need help, and sends a text message to the family, hospital, or other community members for a timely rescue.
Weather Robot 1
(2010)

Weather Robot 1 is a rather specialized service robot, designed specifically to forecast the weather. The robot stands approximately 150cm tall, with only a few degrees of freedom to rotate the head and arms. It roams around on wheels, using ultrasonic sensors around its base to avoid obstacles. It has a camera and a chest-high LCD screen, and displays emoticon-like facial expressions through an LED array. The robot fetches live, 72-hour weather updates for more than 2,300 cities nationwide using voice commands spoken through a microphone. For example, you can ask it, ōHowÆs the weather today in Shanghai?ö and it will respond with something like, ōThe temperature in Shanghai is 29.5 oC today, sunny with a few clouds.ö In the future the robot will provide more detailed responses, like what clothing to wear or what sunblock should be applied. Besides giving the weather or disaster warnings, the robot can also play a quiz.
ZNJ-SW01
(2010)

A general-purpose service robot ZNJ-SW01 stands 165cm tall and weighs more than 50kg. It can nod and shake its head, and twist at the waist. Each arm has 5 degrees of freedom, allowing ZNJ-SW01 to perform common gestures like waving and shaking hands, and its three fingers can hold small objects. It comes equipped with infrared sensors, ultrasonic range finders, wheel encoders, and other sensors to achieve autonomous navigation (accurate to within 20cm) and obstacle avoidance (2 meter radius). The robot moves on wheels with a humanoid upper body. It automatically detects when someone approaches, and if a person stands in front of it for a few seconds, the robot extends its arm to shake hands and says, ōHello, IÆm glad to see you! Can I help you with anything?ö When they walk away more than 1.5 meters, it waves good-bye and tells them to ōcome againö. Besides simple conversations it can play quiz games. It can index more than 100 people using its camera, and remembers them with more than 50% accuracy. A touch screen displays relevant information or endorsements. All of its speech recognition and other functions are processed on an embedded PC.
T63 ARTEMIS
(2003)

T63 ARTEMIS robot was developed as a new type security machines at public space and commercial buildings. T63 can move programmed routes inside buildings independently due to its advanced automatic control systems. It pushes elevator buttons to use elevators. T63 can help security company business. When the robot detects emergency signals from its fire-sensors and human detection sensors, it sends alarm signals to security office. Security officers are then given robotic control to operate surveillance work from remote place. T63 maximum running hour is approx 8 hours with battery changes. Furthermore, T63 can shoot off color balls to intruders for evidential marking. It can also blast off mist steam to block intruders' visions.
NAMO
(2010)

NAMO (Novel Articulated MObile platform) is a humanoid robot built by The Institute of Field Robotics (FIBO) at King MongkutÆs University of Technology Thonburi in Thailand. NAMO is 130cm tall and has 16 degrees of freedom. It moves on a stable three-wheeled omnidirectional base, and is equipped with a Blackfin camera for its vision system. It is capable of simple gesture recognition, visually tracks humans or objects of interest automatically, and can speak a few phrases in a child-like voice (in Thai).
(some interest has arm/hand construction)
KATE 1.0
(2012)

KATE is an autonomous, teleoperated cloud robot that never stops learning. KATE can see, hear, smell, talk and express emotions. Standing 114 cmtall and weighing 31.5 kg, KATE has a total of 22 degrees of freedom (head x7, 2 arms x2, 2 hands x4, torso x1, 2 wheels). KATE has a fully articulated mouth that can show emotions of happy or sadness. The KATE nose can sense carbon dioxide and carbon monoxide, natural gas humidity and smoke from a fire. KATE use the Microsoft Kinect sensor for motion detection and image depth processing and have sonar sensors for distance sensing. KATE also have stereo vision for video conferencing and image processing and can see in the dark with inferred sensors as well in smoke filled room. The robot track system is very powerful and can move on all surfaces and steep inclines. KATE equipped with the Intel Atom 450 microprocessors running at 1.5 GHz with Windows XP and various other embedded software components. The robot run the Aldurino micro controllers for sensor input functions, and GPS. Nice hands!
FLASH
(2012)
LIREC (Living with Robots and Interactive Companions)
FLASH (Flexible LIREC Autonomous Social Helper) is the first Poland humanoid robot. ItÆs a combination of Wroclaw UniversityÆs EMYS (EMotive headY System), WANDA (a four-fingered dexterous hand and arm), and COSMOS (a self-balancing mobile base). It stands 1.2 meters tall, and has approximately 27 DOFs (head x8, neck x3, 2 arms x5, 2 hands x3) actuated predominantly by Robotis servos. It comes equipped with vision and auditory systems and proximity sensors (laser, ultrasonic, infra-red) for obstacle detection, though it relies on predefined maps of its environment. The jaw drops and the brows lift to signal surprise, while the eyelids can blink and rotate which help give it an angry or sad appearance. The eyeballs themselves donÆt actually contain cameras (a single camera is positioned between the eyes), but they can spring out of the head. FLASH is a balancing, mechanoid social robot equipped with the expressive head (known as EMYS) and two dexterous hands WANDA. The robot is capable of communicating with people in verbal and non-verbal ways. Its head and hands serve to express emotions with use of facial expressions and gesticulation. The FLASH motion and navigation system allows it to move on a flat surfaces and operate in known environment. Its control system provides some level of abstraction in a control process, and allows for the migration of social companions.
SAMI
(2012)

Humanoid robot SAMI has been selected as one of fifteen prototypes ōmost likely to be a commercial successö by a French website called Cap Digital. The upper-body SAMI is basically a mannequin that was cut in half and mounted on a large mobile base outfitted with PrimeSense sensors for obstacle detection, and its arms can be controlled using a Kinect sensor. PrimeSense sensors are found in the robot's torso (for detecting people) and base (to help it avoid bumping into objects). SAMI got a pretty broad spectrum of potential applications, including manufacturing and healthcare.
CIROS 3.0
(2011)
The household service robot CIROS is intended to help out around the home by performing simple chores. It can prepare a salad by slicing a cucumber and adding dressing in the video below. Also CIROS is able to recognize common objects as well as kitchen appliances like microwaves, sinks, refrigerators, and dishwashers, and can move intelligently through its environment. The robot's head contains stereoscopic cameras and a 3D IR sensor, which it uses to recognize objects. Furthermore, robust speech recognition is made possible with a 12-piece microphone array. CIROS stands 160 cm tall, weighs 150 kg, and moves in any direction thanks to its wheeled base. It can detect and avoid obstacles in its vicinity thanks to a pair of laser range finders and six ultrasonic sensors in its body. And its dexterous hands can hold a variety of objects and tools.
Tracked robots
Bear

Bear robot was designed to locate, lift and rescue people in harm's way. Bear can do what humans can't: lift heavy loads and carry them long distances. Whether on a battlefield, in a mine shaft, near a toxic chemical spill, or inside a structurally-compromised building after an earthquake, the Bear can rescue those in need without risking additional human life. The Bear's technology is a marriage of three elements: a powerful upper body controlled by hydraulics; an agile mobility platform that features two independent sets of tracked "legs"; and dynamic balancing behavior. The robot is able to balance itself while on the balls of its "ankles." In fact, the Bear can remain upright whether balancing on its ankles, its knees, or even its hips. The Bear project has won key funding from the US Army's Telemedicine and Advanced Technology Research Center (TATRC), a part of the US Army Medical Research and Material Command (USAMRMC).
RoNA
RoNA (Robotic Nursing Assistant) has a humanoid design featuring bimanual dexterous manipulators that employ a series-elastic-actuation (SEA) system. These electric actuators provide manipulator compliance, safety, flexibility and the strength to lift patients weighing up to 226 kg. RoNA also features an innovative humanoid upper torso, a unique mobile platform with holonomic drive and posture stability enhancement, intelligent navigation control with 3D sensing and perception capability, an intuitive and innovative human-robot interaction control interface, and a highly integrated plan for healthcare system assembly. It also has a large screen in its chest allowing for telepresence functions, such as displaying a live video feed of a doctor.
Torso robots (head plus arms)
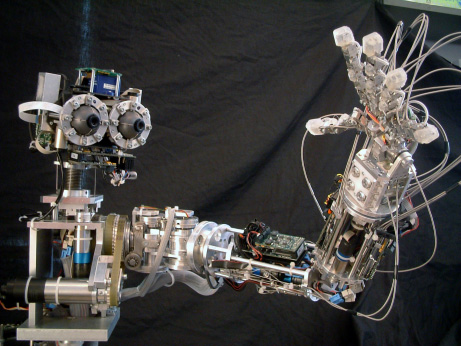
WE-4RII
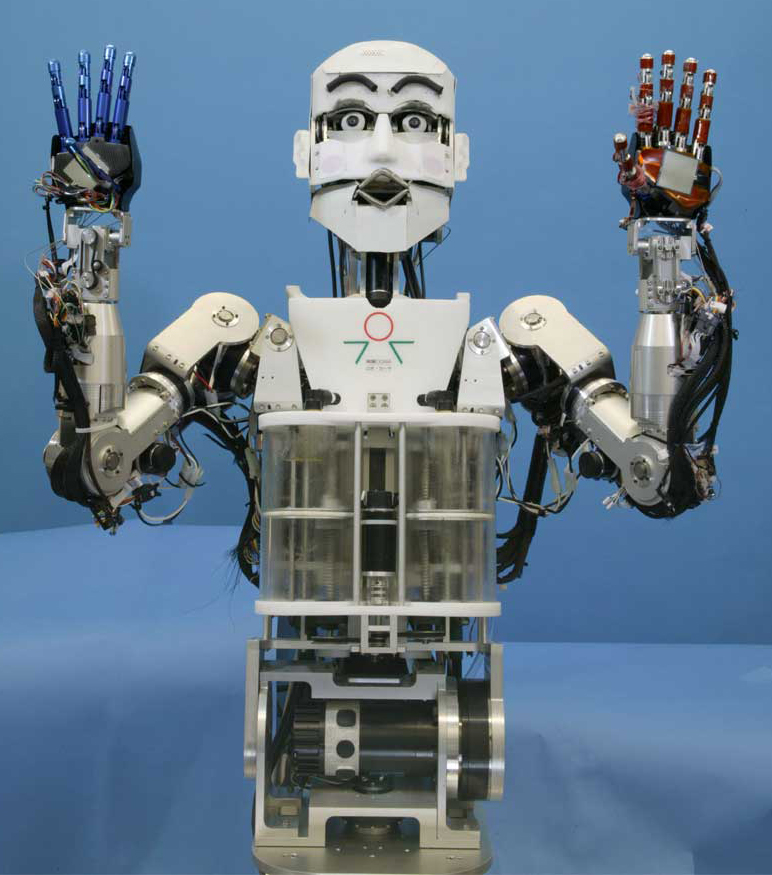
Emotion Expression Humanoid Robot has mechanisms and functions for a humanoid robot having the ability to communicate naturally with a human by expressing human-like emotion. The eyeballs have 1-DOF for the pitch axis and 2-DOF for the yaw axis. The maximum angular velocity of eyeballs is similar to a human with 600[deg/s] for the eyeballs. The eyelids have 6-DOF. WE-4RII can rotate its upper eyelid in order to be able to express using the corner of robot's eye. The maximum angular velocity of opening and closing eyelids is similar to a human with 900[deg/s] for the eyelids. Furthermore, this robot can blink within 0.3[s], which is as fast as a human does.
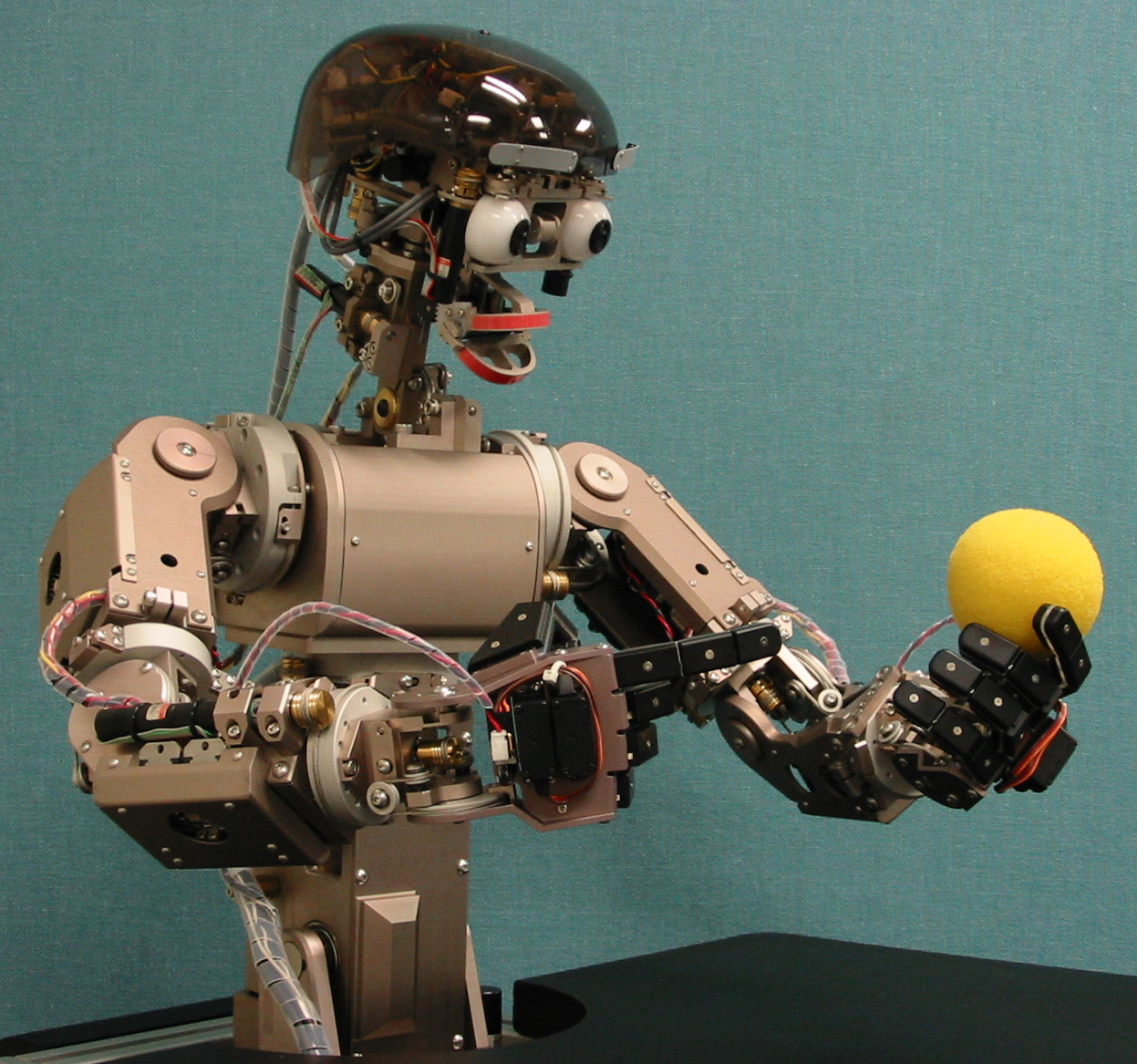
DOMO
(2006)
MIT Computer Science and Artificial Intelligence Laboratory
Weight: 42lbs, Height: 34" tall, 29 active degrees of freedom (DOF); Stereo pair of Point Grey Firewire CCD cameras; Stereo Videre STH-DCSG-VAR-C Firewire cameras; Intersense 3 axis gyroscope; Two 4 DOF hands; Embedded Motorola 56F807 DSPs running a 1khz control loop 4 CANBus channels providing 100hz communication to external computation. 24 tactile sensors, 12 sensor conditioners embedded on-board; Debian Linux cluster running a mixture of C/C++/Python and utilizing the Yarp and pysense robot libraries.
T2 Human Torso
The Meka T2 Humanoid Torso is a two degree-of-freedom force controlled torso for a humanoid robot. Engineered for stability, safety, and reliability, the T2 system features high-strength force-controlled actuators, zero-backlash Harmonic Drive gear heads, integrated brake, and the Meka M3 real-time control system.
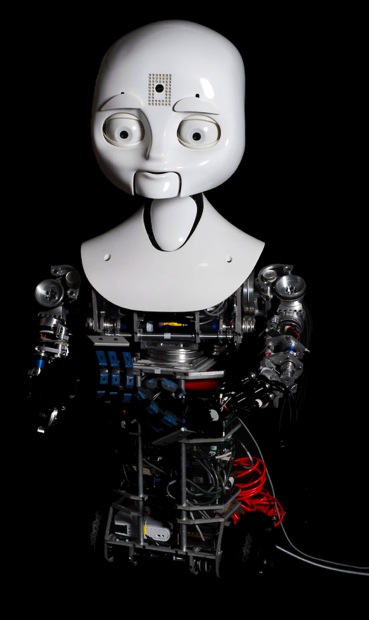
Simon
(2006)
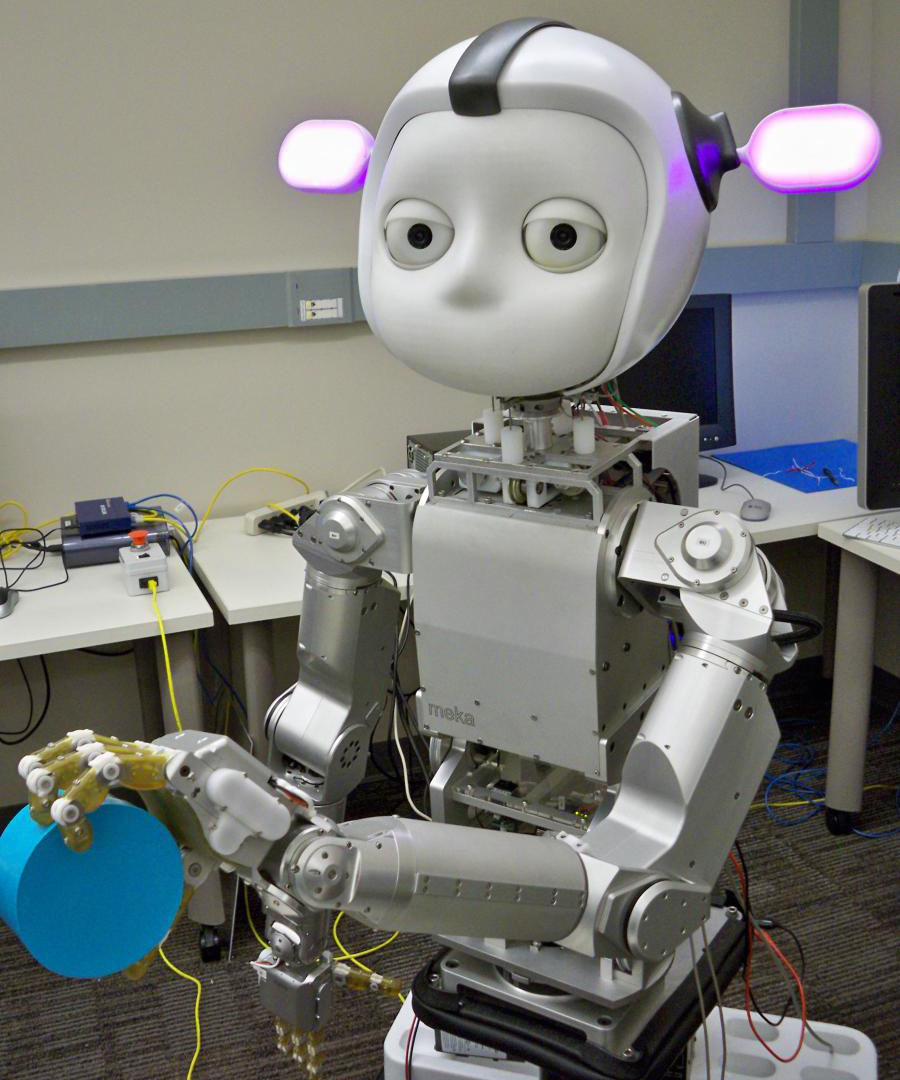
Socially Intelligent Machines Lab
Simon uses computer vision and speech processing to understand what its human instructor is doing. Its articulated torso, compliant 7 DOF arms, and dexterous hands were developed by Meka Robotics. SimonÆs head is child-like in appearance, and also sports two LED-laden ears which can rotate and change color, in order to give the impression of a child-like or non-human intellect while avoiding the pitfalls of the uncanny valley.
Bandit 2
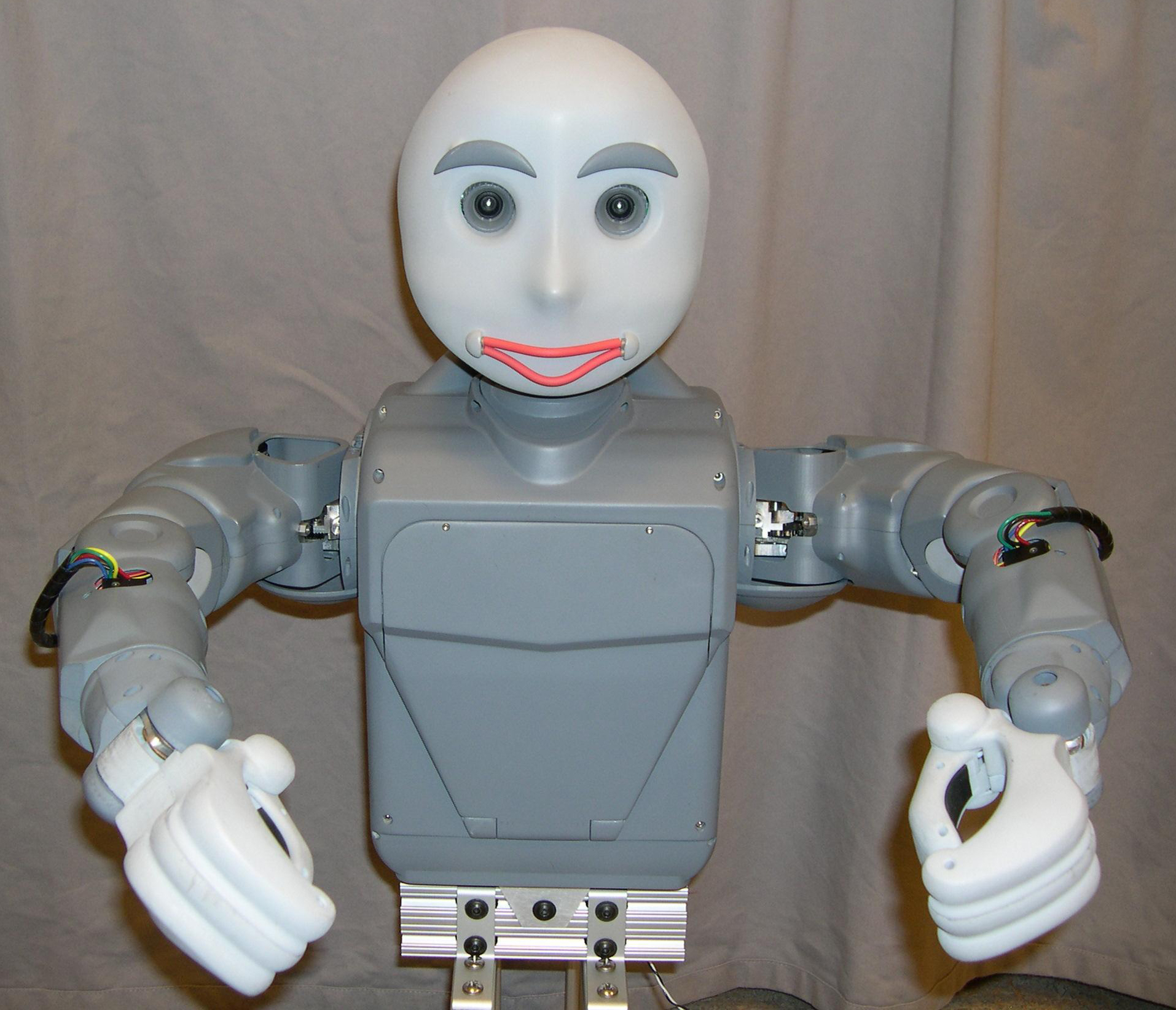
The Bandit 2 robot has a mobile wheeled base with a laser range finder for navigation, but is primarily a humanoid upper torso complete with an expressive face and two arms with grasping manipulators. Bandit 2 are used to study human-robot interaction, imitation learning, and therapy.
Dexterous Torso DT-20

The DT-20 is a humanoid torso with two hands, a waist, and independently directed camera eyes. Mechanical Structure: 24 DOF including two four-DOF grippers, two five-DOF arms, a four-DOF head, and a two-DOF waist. Robot arms reach 120 cm. Control interface - USB. The torso comes with Actin-SE visualization, reasoning, and control software allowing it to perform advanced control by exploiting its many degrees of freedom. With available networking software, it can be controlled remotely through a local area network or over the Internet.
email: info@robai.com
Infanoid
Infanoid is an upper-torso humanoid robot which is as big as a 3- to 4-year-old human child. It has two hands, each of which has four fingers and a thumb that are capable of pointing, grasping, and a variety of other hand gestures. The head of Infanoid has two eyes, each of which contains two different color CCD cameras for peripheral and foveal view; the eyes can perform saccadic eye movement and smooth pursuit of a visual target. The video images taken by the cameras are fed into a cluster of PCs for real-time detection of human faces (by skin-color filtering and template matching) and of physical objects such as toys (by color/motion segmentation).
see also Infanoid page... specs... history...
Justin

Justin sports not one, but two of the DLR-III Light-Weight arms (now being manufactured by Kuka).
SDA5D Assembly Robot
(2011)

New Motoman SDA5D robot has 15 axes of motion (7 axes per arm, plus a single axis for base rotation). Maximum payload is 5 kg per arm. Internally routed cables and hoses reduce interference and maintenance, and also make programming easier. Both robot arms can work together on one task to double the payload or handle heavy, unwieldy parts, trays or pallets. The ability to use dual independent arms to process parts reduces the need for expensive custom fixturing and allows end-of-arm tooling to be simple and less costly. Robot can hold a part with one arm while performing operations on the part with the other arm, and can also transfer a part from one arm to the other with no need to set the part down.
SDA10D Assembly Robot

Powerful actuator-based design of the dual-arm SDA-10D robot provides human-like flexibility and fast acceleration. Superior dexterity and best-in-class wrist characteristics make the robot ideally suited for assembly, part transfer, machine tending, packaging and other handling tasks that formerly could only be done by people. Internally routed cables and hoses reduce interference and maintenance, and also make programming easier. Handles 10 kg payload per arm; 20 kg payload possible when using both arms. Both robot arms can work together on one task or independently to perform tasks concurrently, and transfer a part from one of its arms to the other.
SDA20D Assembly Robot

The SDA-20D dual-arm robot provides high-speed motion with two six-axis arms that provide enhanced, human-like flexibility of movement. Robot has a 20 kg payload per arm, a 910 mm reach per arm, and a repeatability of ▒0.1 mm. Both robot arms can work together to double the payload or or handle heavy, unwieldy objects. In addition, both robot arms can perform tasks independently without degradation of throughput. Robot can also transfer a part from one of its arms to the other with no need to re-grip the part.
NEXTAGE
(2009)

KawadaÆs latest humanoid robot, the Nextage, is set to outperform people working solo or in a collective. With versatile arms and precise movements, this could be KawadaÆs answer to the SDA10D assembly robot.
Robonaut 2(R2)

NASA and General Motors are working together to accelerate development of the next generation of robots and related technologies for use in the automotive and aerospace industries. The two organizations developed and built the next iteration of Robonaut. Robonaut 2, or R2, is a faster, more dexterous and more technologically advanced robot. This new generation robot can use its hands to do work beyond the scope of prior humanoid machines. R2 can work safely alongside people, a necessity both on Earth and in space.
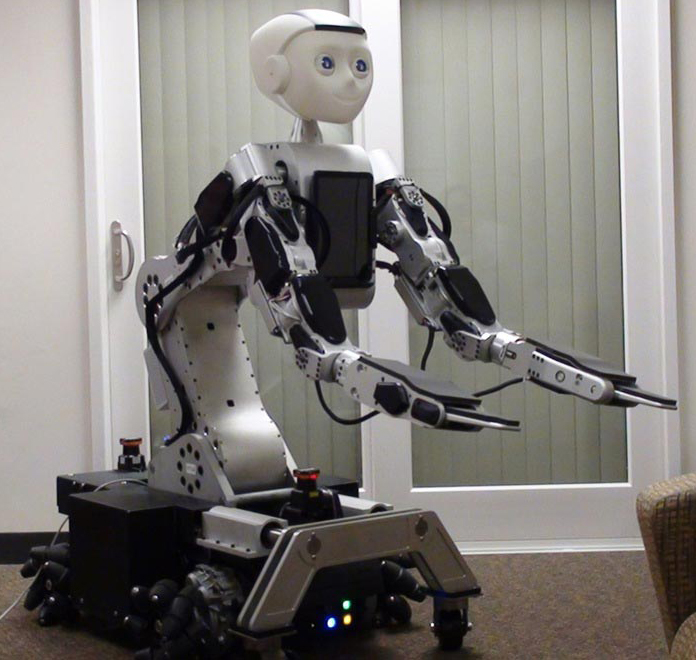
RoboThespian RT3
The new model RoboThespian RT3 unlike previous model robot RT-2 (see here) can move his legs. What's also new: advanced motion programming using virtual 3D robots; remote diagnostics and set up for all hardware modules; improved error checking and fault reporting; transparent body shell for legs and forearms; articulated hands with four independent fingers on each hand; rotation axis in the forearms; proportional control of wrist flex/ extend axis; position feedback on all major axis; improved leg design.
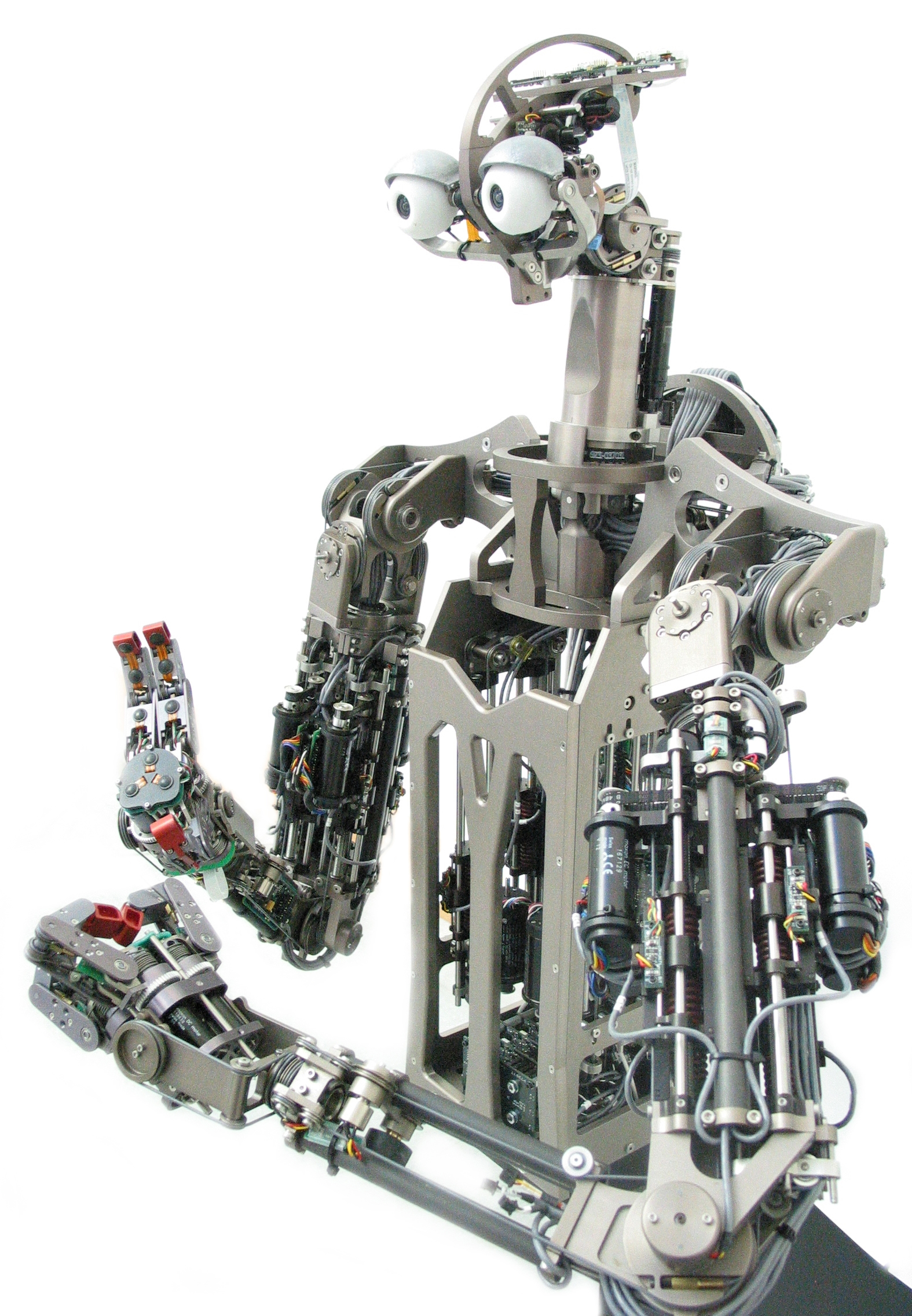
CRONOS

Cronos is the most advanced physical copy of the mechanical anatomy of the human body that we know of and has 45 powered degrees of freedom to produce: a head that can move in all directions; a single pan-tilt-roll camera for an eye; a very long, flexible neck for visual inspection of objects; a rigid thorax - no lungs afterall; a flexible spine complete with vertebral discs; the first working, powered copy of the human shoulder with gliding shoulder blade; two arms that can each lift a 2kg load; fully mobile wrists; five fingered hands.
ECCEROBOT
(2010)

The ECCEROBOT project is a spin-off of the CRONOS project conducted at the University of Essex. The goal of this project was to investigate machine consciousness through internal modeling. ECCEROBOT skeleton is very detailed replicate of the human model, consisting of bones and joints formed out of polymorph. The actuator subsystem consists of the individual 80 actuators (one for each muscle). Each actuator, in turn, consists of a screw driver motor, a gearbox, a spindle, a piece of kiteline as tendon and an elastic component represented by shock cord.
RT-1/BERTI
RT-1/BERTI is a self contained, fully automated Robotic Torso, designed and built by Elumotion to provide a robotic platform based on human anatomy. It is a highly articulated manipulating platform and includes novel dexterous hands that allow emulation of human gesturing.
WAS-2
(2009)

Waseda Saxophonist Robot v. 2 (WAS-2) is composed by 22-DOFs that reproduce the physiology and anatomy of the organs involved during the saxophone playing as follows: 3-DOFs (from which 1-DOF is passively controlled) to control the shape of the artificial lips, 16-DOFs (!!!) for the human-like hand, 1-DOF for the tonguing mechanism and 2-DOFs for the lung system (1-DOF for the air pump and 1-DOF for the valve mechanism). In order to reduce the weight on the hand part, the actuation mechanism is composed by a wire and pulley connected to the RC motor axis. In order to control the motion of each single finger, the RS485 communication protocol has been used.
WAS-2R
(2010)

Waseda Saxophonist Robot v.2 Refined (WAS-2R) has been designed to improve performance stability WAS-2 by redesigning the shape of a oral cavity and embedding sensor of the finger. In particular, the WAS-2R is composed by 22-DOFs that reproduce the physiology and anatomy of the organs involved during the saxophone playing as follows: 3-DOFs (from which 1-DOF is passively controlled) to control the shape of the artificial lips, 16-DOFs for the human-like hand, 1-DOF for the tonguing mechanism and 2-DOFs for the lung system (1-DOF for the air pump and 1-DOF for the valve mechanism). In order to reduce the weight on the hand part, the actuation mechanism is composed by a wire and pulley commented to the RC motor axis. In order to control the motion of each single finger, the RS485 communication protocol has been used. In addition, in order to compensate the delay on the response of each finger mechanism, rotary encoders have been embedded to compensate the dead time. As a result, the response of all fingers can be synchronized during the performance.
RAMeX

RAMeX stand for Reusable Animatronics Mechanism for the Extremity, so the robot can be reused number of times to replace a stuntman during filming a dangerous scene from a movie such as on fire, car crash or falling. RAMeX has a realistic human sized humanoid with 17~21 joints (3 axis on neck, 8~12 axis on both arms and 6 axis on the both legs). By using a Hand Puppet, number of different joints can be controlled remotely (up to two controllers can be used). A single board computer is installed to receive, save and reply data. The RAMeX can be controlled and used in a normal condition, in fire, and during a strong impact. After a stunt, the damaged part can be quickly replaced to be used again.
AILA
(2012)
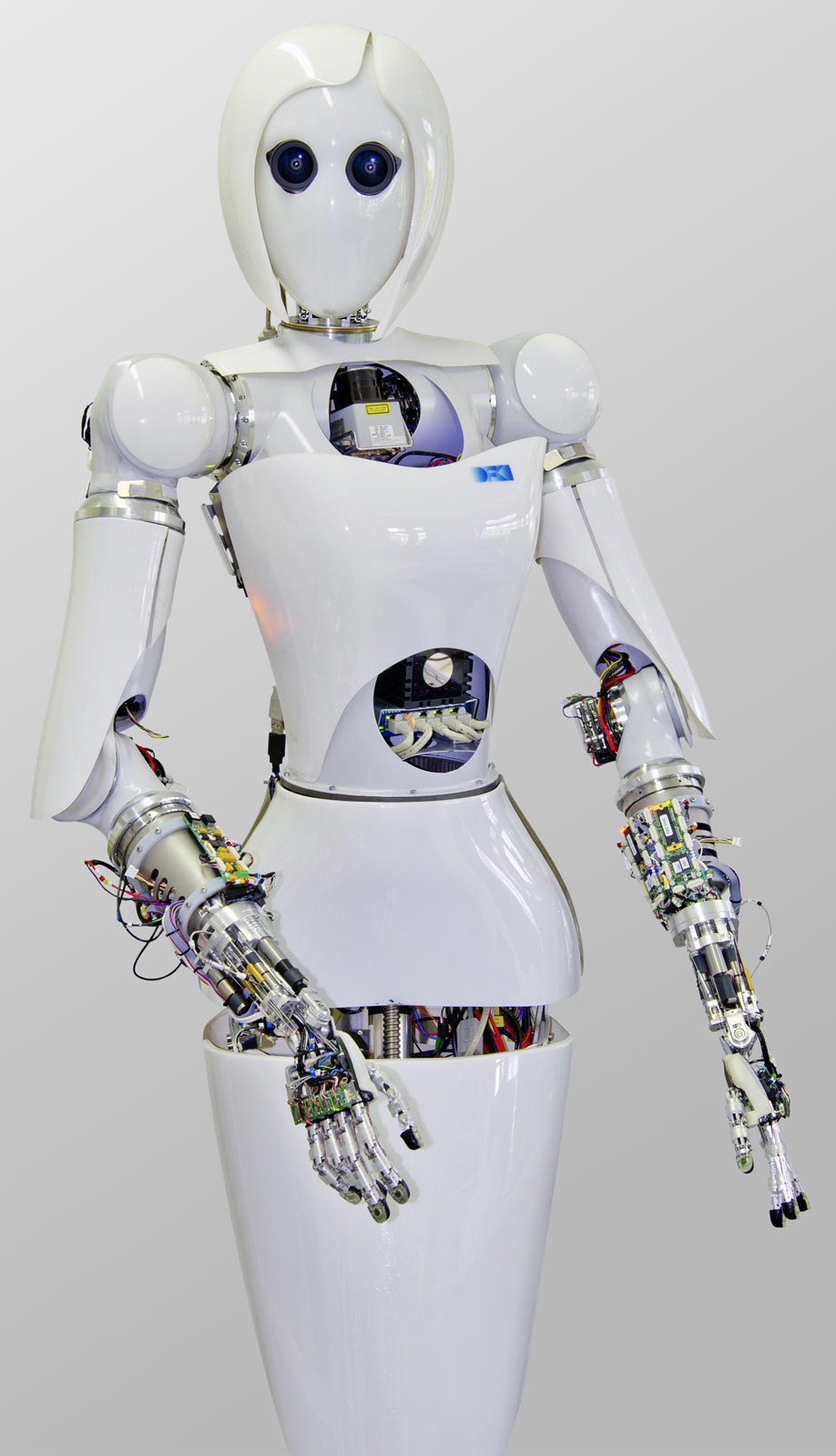
The robot AILA is intended for work in ISS. The robot can mimic human movements of the torso (4 DOFs), arms, and hands. The height of robot is 1.7m. To grasp and use tools as well as operate control panels on ISS AILA has a pair of five-fingered hands and 7-DOF arms with payload weight more than 1 kg. Most of the time the AILA will be tele-operated by a human on Earth. In order to recreate human-like movements, the robotÆs hardware include: a stereo camera in the head as well as a 3D-camera on the torso used for object and scene recognition, and pose estimation, and two computers for vision processing and motion control, one located in the head and one in the torso. The AILA's ōnervous systemö consists of three independent CAN-lines for communicating with the arms and torso, GigaEthernet connection for the stereo camera, and RS-485 for the servos moving the pan-tilt unit on the head. An RFID-antenna integrated inside the left hand enables the robot to communicate with the digital product memory in order to obtain information regarding size, weight, and lifting points of the considered object as well as to store in it a summary of the handling operations performed.
note: the hands is OK!
ZAR5

The humanoid muscle robot torso called ZAR5 (i.e. Zwei-Arm-Roboter) has human-like proportions and functionality, which is fully actuated by artificial air muscles. The robot is 190 cm tall and the proportions are similar to humans of this size. Attention has been concentrated on its human size, anthropomorphic proportions and functionality of the actuators. The radius of action as well as the velocity of movement is anthropoid. The company FESTO has provided the linear actuators of the fluidic muscles. Tendons of Dynema filaments are used to convey the tractive force to the joints as regards tensile strength, lightweight and little bending radius. The hand is the most interesting and complicated component of the ZAR5. The hand was assembled separately, tested on a vice and was finally attached to the arm. The hand has 12 DOFs (!!!) without the wrist.
This article describes hands (and the robot) construction. See also here... and here...
Commercial available mini humanoids
PINO
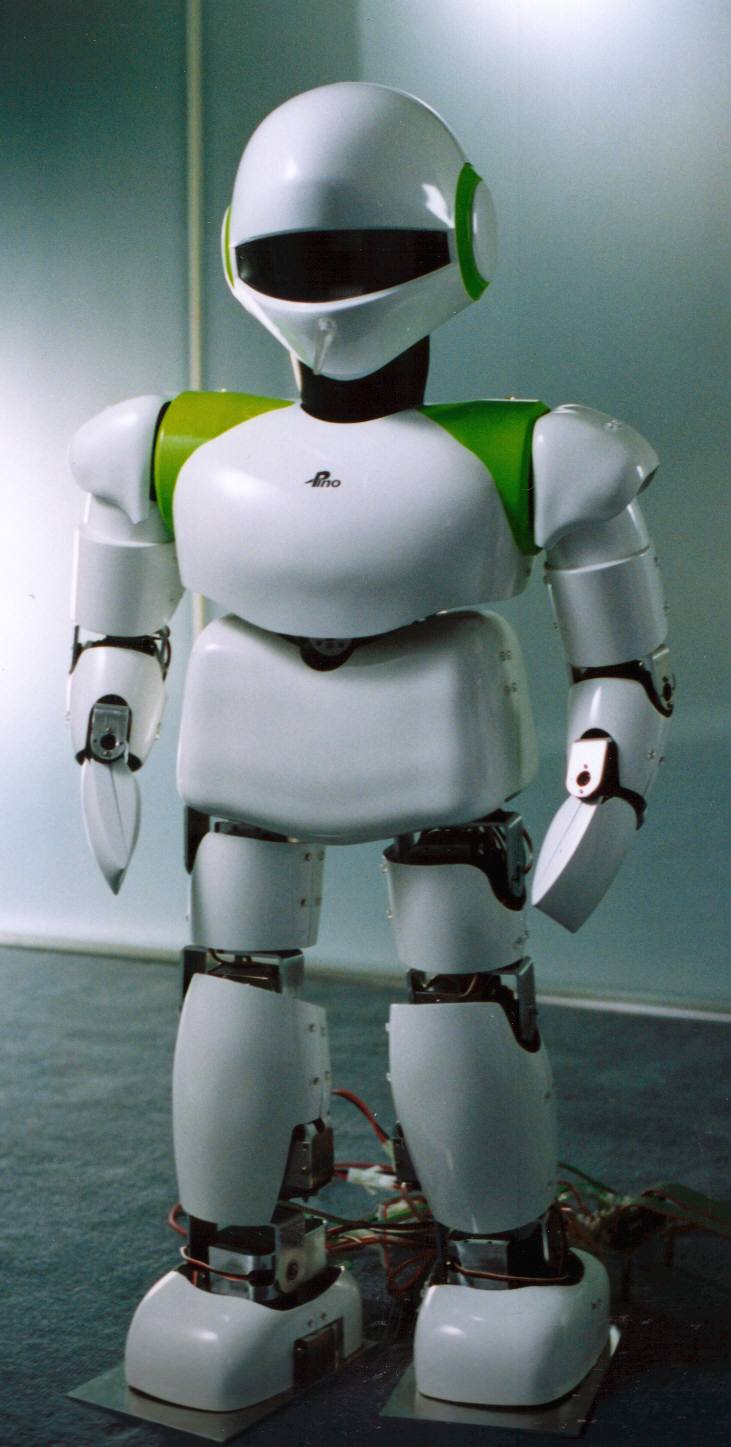
Height - 70cm; weight 4,5kg; max. speed - 0,05m/s; active DOFs - 26; sensors: vision sensor (CMOS sensor) - 1; force sensor (FSR) - 8; joint angle sensor (potentiometer) - 26; host computer - PC (Pentium III 733MHz, 512MB); operating system - RedHat Linux 6.2 Kernel 2.2.14-5.0 RT-Linux 2.2; robot controller - SH2 (HD64F7050 20MHz) CPLD(EPF10K30ARC240-3); AD board - Contec AD12-64 (PCI); frame grabber - I/O DATA GV-VCP2/PCI; energy supply - DC-servos; power supply - DC6V, 50A; power consumption - 410 Watt
see also pdf and site
the project is canceled
HOAP 3
Height - 60cm; weight - 8,8kg, control with a 1,1GHz Pentium M processor that runs on RT-Linux; distance sensor, grip sensor, and acceleration sensor are controllable through a wired or wireless LAN; equipped with a camera, microphone, speaker, expression LED, audio recognition function, voice synthesis function, and image recognition function. see specs...
$94500
w/s
Rogun

Rogun is an entertainment robot capable of walking (3.5m/min), dancing, face tracking, grasping small objects (up to 1kg), and remote monitoring. It has a 21cm (7″) LCD display in its chest which shows everything in its field of view. It stands 92cm tall, weighs 7.8kg, and has a total of 26 degrees of freedom (neck x2, 2 arms x5, 2 hands x1, 2 legs x6). Its main sensor is a CCD camera which it uses to shoot and record video, and to track faces and objects. It also has simple gesture recognition. Users can connect to the robot via mobile phone or PC to control it and watch live video from the robotÆs point of view. It has microphones for recording voice messages, and has limited voice recognition, but cannot respond using speech synthesis (it only plays recorded audio files). Gyros, pressure sensors, and accelerometers help it maintain balance.
the project is canceled
Nao

The robot is based on a Linux platform and scripted with Urbi, an easy-to-learn programming language, with the option of a graphic interface for beginners or code commands for experts. The robot will be able to interact with its owner, with evolving behaviors and functionalities. Additionally, the user will be able to teach the robot new behaviors using a computer with Wi-Fi connectivity. The behaviors creating software is designed to fit with any users levels : from graphical blocs editing for beginners to code for more skilled users. Height 58 cm.
iCub
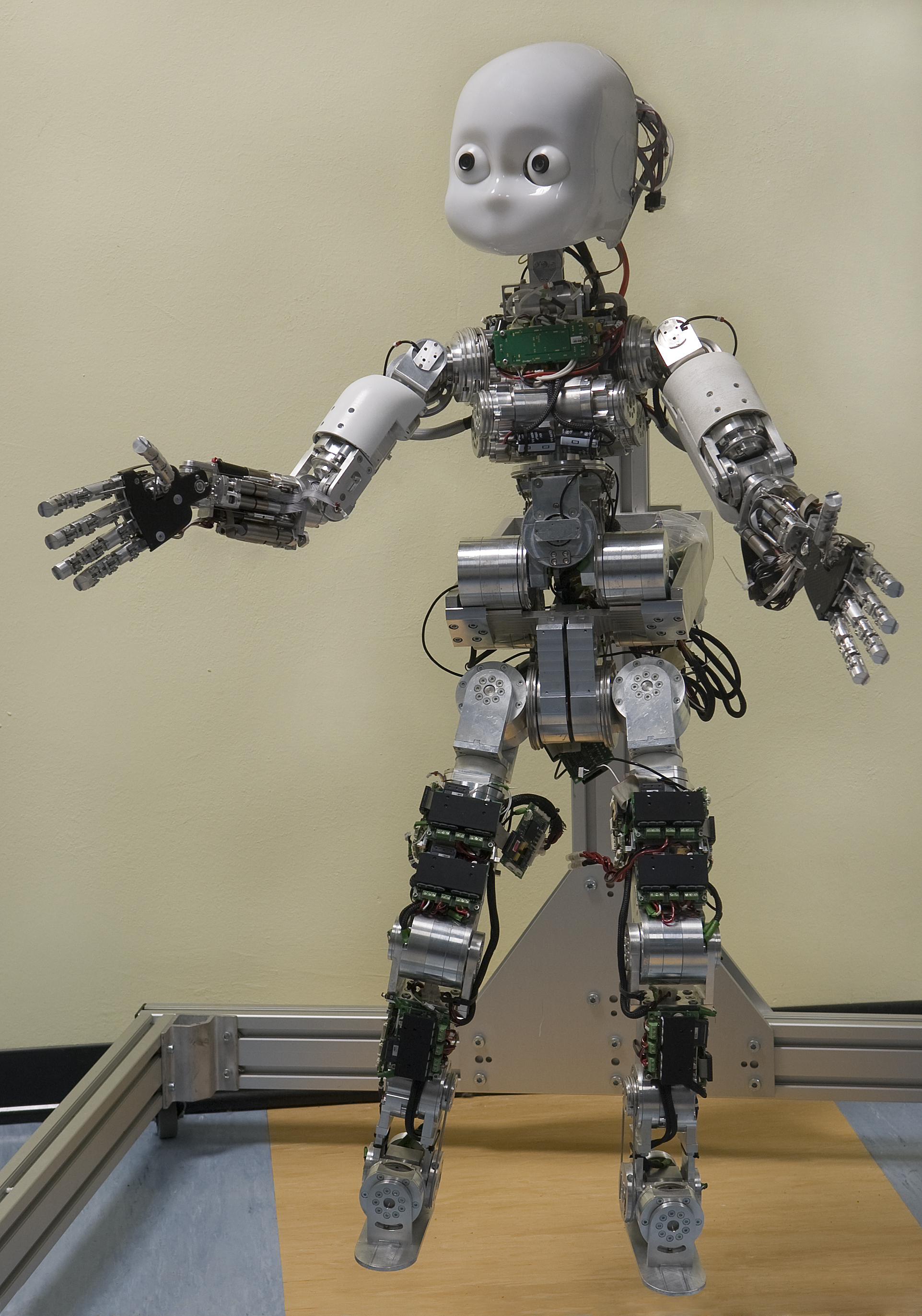
The iCub is the humanoid baby-robot designed by the RobotCub consortium. The iCub will be a full humanoid robot sized as a three year-old child. The total height is estimated to be around 105cm. It will have 53 degrees of freedom (DOF), including articulated hands to be used for manipulation and gesturing and a weight of roughly 20 kg. The robot should be able to crawl and sit (to free the hands from supporting the body) and autonomously move from crawling to sitting and vice-versa.
Dubious, deserted or obscured projects
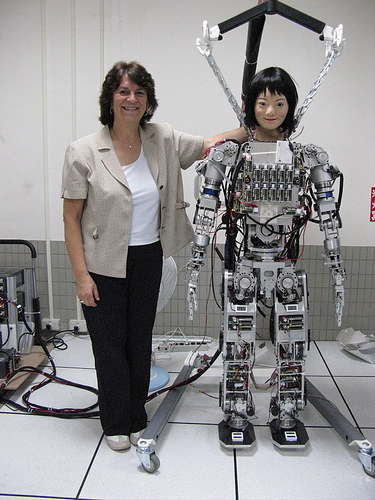
H7

The height of the robot is 1370mm, the width is 590mm, and the mass is 55kg including 4kg of batteries. The robot has a total of 35 degrees of freedom (DOF): 6 for each leg, 1 for each foot (toe joint), 7 for each arm, 1 for each gripper, 2 for the neck, and 3 for the eyes. All major joints are driven by DC motors and Harmonic drive gears. An onboard PC equipped with dual PentiumIII-750MHz processors running RT-Linux is used for real-time servo and balance compensation, as well as coordinating high-level 3D vision and motion planning component software modules. The system is connected to the network via wireless ethernet.
QRIO

Height - 58 cm, weight - 6,5 kg
BabyBot
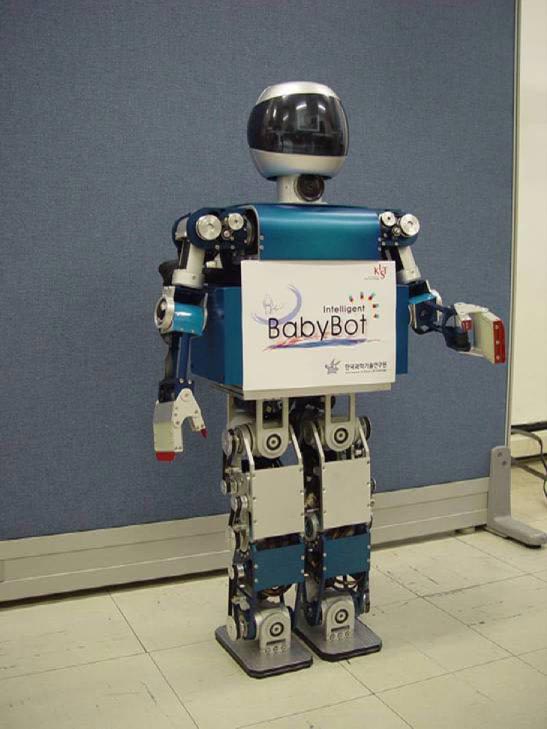
Height - 75cm; voice recognition and speaking functions; the camera and image processing module to realize the visual intelligence; the gyroscope to control the posture by oneself
4
Bonobo

Height - 95cm; weight - 25,3kg
5
Kotaro
JSK laboratory (The University of Tokyo)
Size: 500mm (width) x 1330mm (height) x 350mm (depth) Weight: 20kg Energy (electricity): [power]24V [logic]5V Duration: Power source is outside the robot. Kinematic structure: 91 DOF(joints) Number of actuators: 120 Sensors: muscle-length, muscle-tension, motor current, temperature, joint-angle (not all), distributed tactile sensor, fleshy soft tactile sensor, two eyes, two ears, 1 speaker (not a sensor though)
UT-theta

Height - 150 cm, Weight - 45kg, Number of Joints - 23. The hardware system of UT-theta equips the core CPU board with PISA bus, Titech Version2 and TID(Titech Intelligent Driver) for motor drivers, Ritech for I/O(D/A conversion, A/D conversion, and pulse count), monochrome progressive camera (x2) (for stereo-scopic vision) + color NTSC camera (x1) (for color recognition) at the head, IP5000(Hitachi inc.) for vision processing, 6-axis force(Nitta) at the elbows and ankles, and 3-axis accelerometer and gyro at the trunk.
REEM-A
Weight: 41 Kg, height - 1,45 meters; degrees of freedom (total 30): 6x2 legs, 6x2 arms, 2 neck, 2 waist, 1x2 gripper; autonomy (batteries) - 1,5 hours; maximum payload - 2 Kg per arm; main computer: Pentium M at 2.0 Ghz; sensors: tilt sensor (six axis), force/torque sensors, stereo camera, 3D RangeFinder, additional stereo camera on the chest, microphone
$120000
i-1

The robot stands 155 cms tall and weighs around 85 kgs. It has 7 sensors each in the arm and leg, 3 in the waist and neck, 6 in the each hand and 2 in each eye for smoother movement. The arms, legs and waist are powered by a hydraulic actuator whereas the fingers are powered by a pneumatics actuator. It has 4 stereo cameras and 2 mics in its head along with 26 axial force, 3 axial gyro and 1 axial accelerometer sensors which are located throughout the body. The robot using the stereo cameras analyzes and stores human motions and gestures. It runs on ART-Linux and uses Ethernet for internal communications.
James
James consists of 22 DOFs, actuated by a total of 23 motors, whose torque is transmitted to the joints by belts and stainless steel tendons. The head is equipped with two eyes, which can pan and tilt independently (4 DOFs), and is mounted on a 3-DOF neck, which allows the movement of the head as needed in the 3D rotational space. The arm has 7 DOFs: three of them are located in the shoulder, one in the elbow and three in the wrist. The hand has five fingers. Each of them has three joints (flexion/extension of the distal, middle and proximal phalanxes). Two additional degrees of freedom are represented by the thumb opposition and by the coordinated abduction/adduction of index, middle, ring, and little fingers. The overall size of James is that of a ten-year-old boy, with the total weight of about 8 kg.
see more articles: here (general design) and more about James neck here...
BARTHOC

BARTHOC as technical basic system is used on the one hand to generate algorithms for emotional and social behavior in robots and on the other hand to investigate the communication and interaction behavior of humans in controlled scenarios from an empirical, qualitative and philosophical perspective.
KOZOH 3

Height - 100cm weight - 25 kg.
KOZOH 4
Humanoid robot KOZOH 4 intended for researching dynamic motion. The robot has the movement of each joint the same as the human movement. KOZOH 4 is 115 cm in height, weighs 25kg. It is possible to use OpenHRP for developing motion control algorithms.
DA20

The DA20 dual-arm robot provides high-speed motion with two six-axis arms that provide enhanced, human-like flexibility of movement. Robot has a 20 kg payload per arm, a 765 mm reach per arm, and a repeatability of ▒0.1 mm. Both robot arms can work together to double the payload or accomplish intricate tasks. In addition, both robot arms can perform tasks independently without degradation of throughput. Robot can also transfer a part from one of its arms to the other with no need to re-grip the part.
DIA10

The DIA10 robot provides high-speed motion with two seven-axis arms that provide enhanced, human-like flexibility of movement. The unique DIA10 features 15 axes of motion (seven axes per arm, plus a single axis for base rotation). The DIA10 robot has a 10 kg payload per arm. Both robot arms can work together on one task or independently to perform tasks concurrently, and transfer a part from one of its arms to the other.
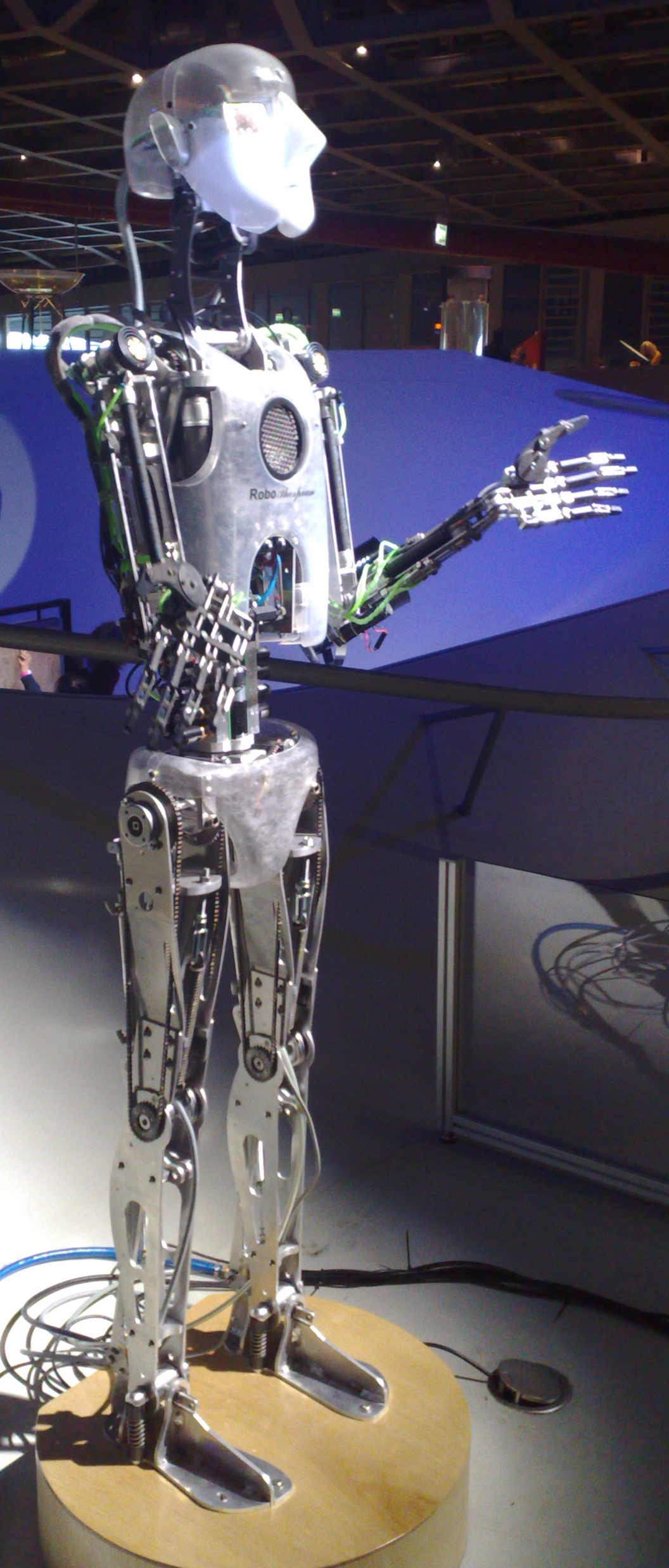
RoboThespian

RoboThespianÖ is 1.7m tall, built from welded aluminium and powered by a combination of compressed air and electric motors. Each RoboThespianÖ has 31 moving axes, under proportional control, allowing variable speed and the ability to hold any position. Trouble shooting is simplified, as the custom designed electronics feature self-diagnostics and fault tolerance. RoboThespianÖ is controlled by a networked distributed IO system, which means that a RoboThespianÖ only requires a LAN cable, a compressed air line and a mains electrical supply to work. RoboThespianÖ can be controlled with a live motion capture rig ¢ he follows your body movements and uses your voice ¢ you can hear what he hears and see through his eyes ¢ the ultimate tele-presence.
Euro
16
KHR-3 (HUBO)

High - 125cm; weight - 56kg; degree of freedom - 41; max. speed - 1,25km/h with a stride around 0~32cm; independent 5 fingers movements; external force sensing through the force/torque sensor at the wrist; power source - 300W NiMh battery; continuously operation time: 90mins. once charged; remote controlling through the wireless network; real-time window xp - RTX; talking with voice recognition and synthesis
17
Janet
Taiwan's first humanoid robot performer, which is capable of speaking, singing and walking.
NTUST

RESr-I

Advanced Robotics & Intelligent Control Centre (ARICC)
The modular biped robot system of RESr-I (Robo-Erectus Senior ¢ I) consists of a set of independently designed modules, such as actuators, passive joints, rigid links (connectors) that can be rapidly assembled into a complete robot with various configurations having different kinematics and dynamic characteristics. Off-the-shelf intelligent mechatronic drives, PowerCube, are selected as actuator modules for rapid deployment. The inter-module communication is through the CAN-bus protocol and the RS-485 serial interface. Based on hierarchical control concept, low-level trajectory generation and control are developed. Weight 44 kg, Height 140 cm
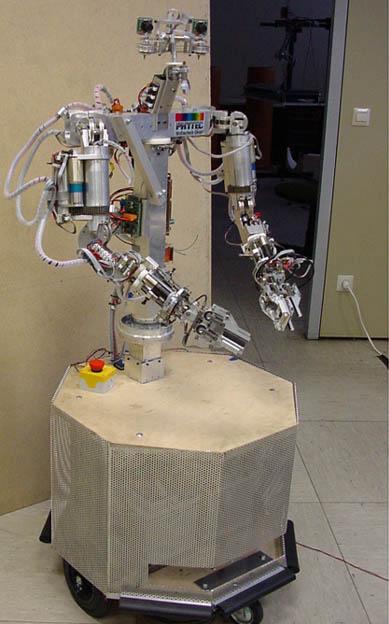
ARMAR-II
(2002)

Mechanically this robot consisted of an autonomous mobile wheel-driven platform, a body with 4 DOFs, a two arm system and a stereo camera head. The anthropomorphic body of the robot was placed on a mobile platform and supported a rotation of about 330 degrees. It also was able to bend forward, backward and sideward. Since the robot should support a simple and direct cooperation with humans, the physical structure (dimension, shape and kinematics) of each arm was developed as close as possible to the human arm in terms of segment lengths, axis of rotation and workspace. Furthermore, ARMAR-II had two redundant arms each having 7 DOFs and a length of 65 cm.
ARMAR-I
(2000)
A speech recognizer, 3D face- and hand-tracking, pointing gesture recognition, recognition of head pose, a dialogue component, speech synthesis, a mobile platform, a stereo camera system, including pan-tilt, unit mounted on the platform.
22
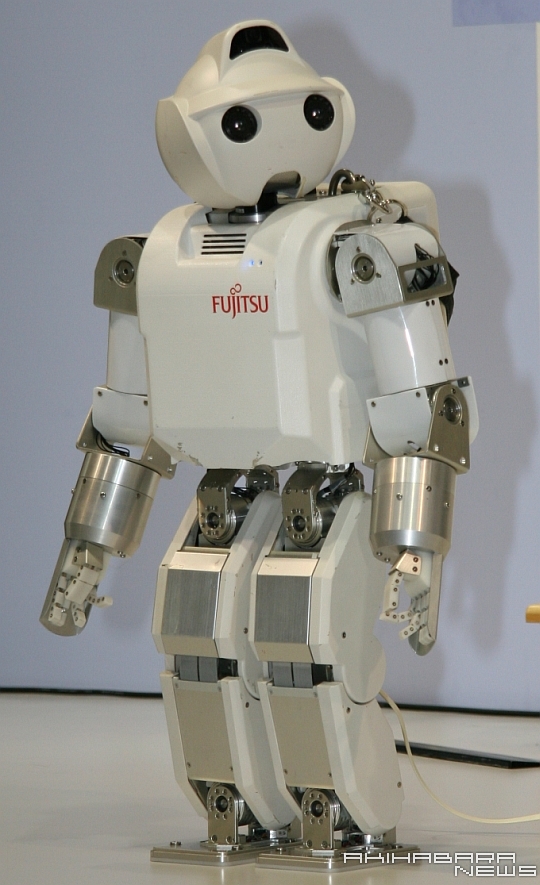
Toyota running robot

ToyotaÆs humanoid robot prototype stands 130cm tall and weighs 50 kg. Its legs have 7 degrees of freedom and it can run at an average speed of 7 km/h. The robot takes a stride every 340 ms and actually breaks contact with the ground for about 100 ms each time. The Toyota researchers had to develop new real-time methods for balance control. These methods make it possible for the robot to remain balanced when an external force such as a push from a human is applied when in motion.
23
ARNEO

ARNE is 123 cm tall, weighs about 61 kg, and has 28 degrees of freedom. Especially for robot arms and legs low-speed brushless DC 16 and 60 W motors were developed by NE Company. All robot drives, motion generation and stability are controlled by Motorola DSP56F805 microcontrollers. High-level decision-making, video and audio processing is performed by remote PC.
SURALP
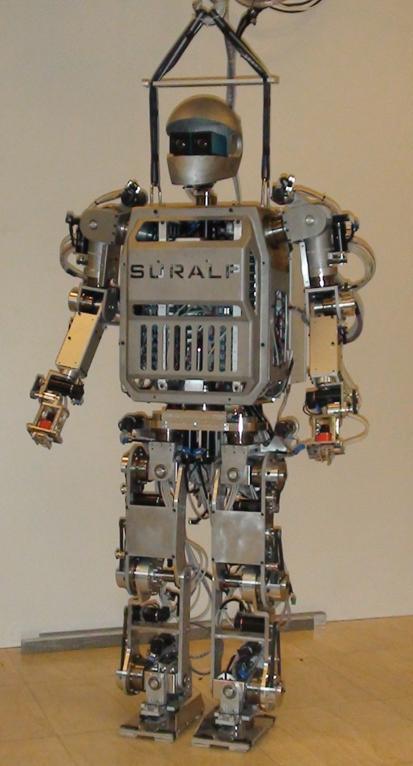
A full body human size humanoid robot is being built for experimental walking studies on rough terrain. Visual and force control techniques will be implemented for interaction with the environnent.
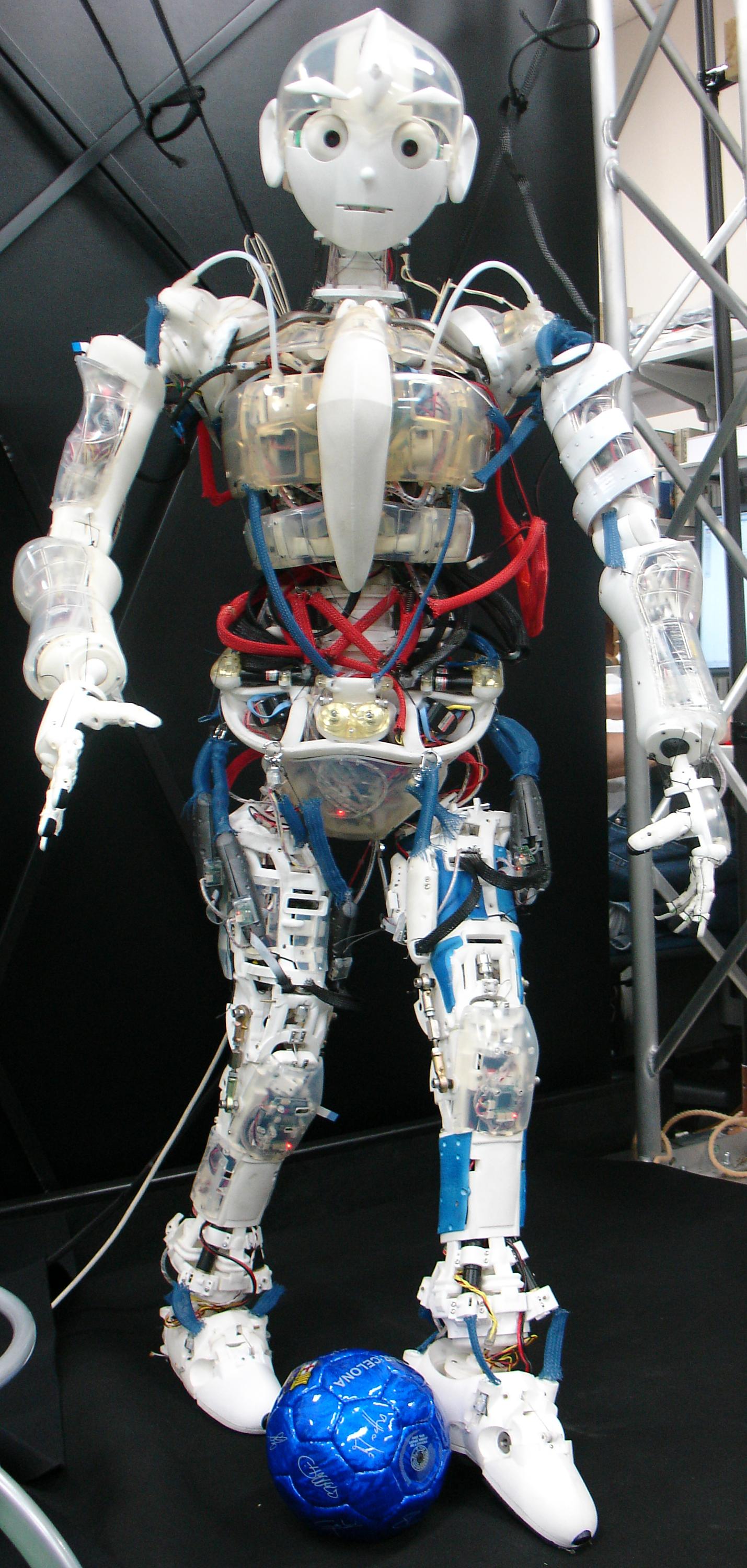
Kojiro

Kojiro is an advanced musculoskeletal humanoid robot. Its body was created to mimic the way human skeleton, muscles, and tendons work to generate motion. The goal is to build robots that are light and agile, capable of moving around and interacting with the physical world in the same way our flesh bodies do.
HRP-2W

HRP-2W's upper body has 2 DOFs for neck, 7 per arm, 2 for waist, and total DOF is 12. There are binocular color camera for stereo vision and stereo microphones for speech dialogue and sound source localization on its head. Force sensors for 6 axes are also furnished on its both hands to realize behaviors which need interaction against external world. Its lower body utilize electric wheelchair made by Inavacare, Inc. Not only planar move with wheels, but also vertical move is able. The height of HRP-2W is 171 cm. Laser Range Finder made by SICK, Inc. is also place on the wheelchair for obstacle avoidance, SLAM, and so on.
NUBO (PGR3)

The NUBO is 130cm tall, weighs 80kg, and can travel at 70cm/sec on its wheeled base. It has 5 ultrasonic sensors for localization, another 8 ultrasonic sensors for obstacle detection, 2 bump sensors, an IR scanner, and cameras. A 12 inch LCD touch screen allows peoples to interact with it. Remote operation is also possible, allowing an operator to monitor the view of the robot and move it to a specific destination.
Monty
Monty has one fully articulated hand driven by 18 motors and one gripper. Driven remotely by a human operator, they will be able to perform a wide range of manual labor tasks.
Nexi
Nexi was specially designed to mimic human movements at roughly the same speed. The neck mechanism has four degrees of freedom and its face is able to express emotions through an array of movable features, such as the eyes, mouth, eyebrows and so on. Two CCD cameras placed inside each eye gives it binocular vision of its surroundings, while an Active 3D infrared camera and microphones located in the forehead allows it to make 3D maps of the environment in which it is placed. Nexi uses a two-wheel dynamically balanced system to move around. Nexi is powered by lithium-ion batteries and controlled by an onboard personal computer working on a Linux operating system.
RIBA
(2008)
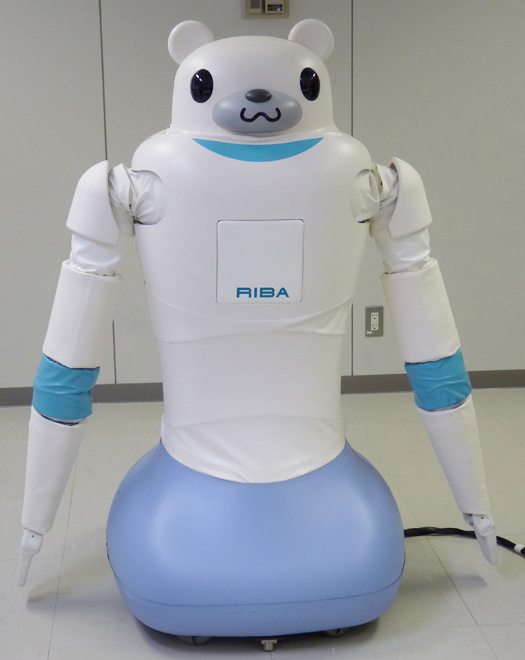
The nursing-care assistant robot RIBA (Robot for Interactive Body Assistance) weighs 180kg, and stands 140cm tall, was made to look like a cuddly teddy bear to avoid frightening patients. RIBA has tactile sensors embedded in its arms underneath pliant urethane foam rubber, which detects slippage and helps hold a person comfortably. Robot designed to help cope with JapanÆs aging population will need to be more productive and reliable than ever.
31
AMIO

Amio has 36 DOFs, stands 150cm tall, and weighs 45kg. His walking speed is only 1km/h. He has 2 CCD cameras for vision, 8 inclination sensors throughout his body, and 4 FSRs (force sensing resistors) per foot to locate the ZMP (zero moment point). AmioÆs speech and vision recognition software allow him to guess a personÆs emotional state, but his fully anthropomorphic shape is more ideal for human-robot interactions. The strength of the software has been proven in several experiments, where the robot chose an appropriate conversation topic and behaved appropriately in response to human emotions. They could ask you what you are angry about and then make a joke to console you or make you laugh.
Vincent

Vincent has 30dofs, stereo vision, object detection, face recognition.
Other information is not available
ASIMO
(2007)
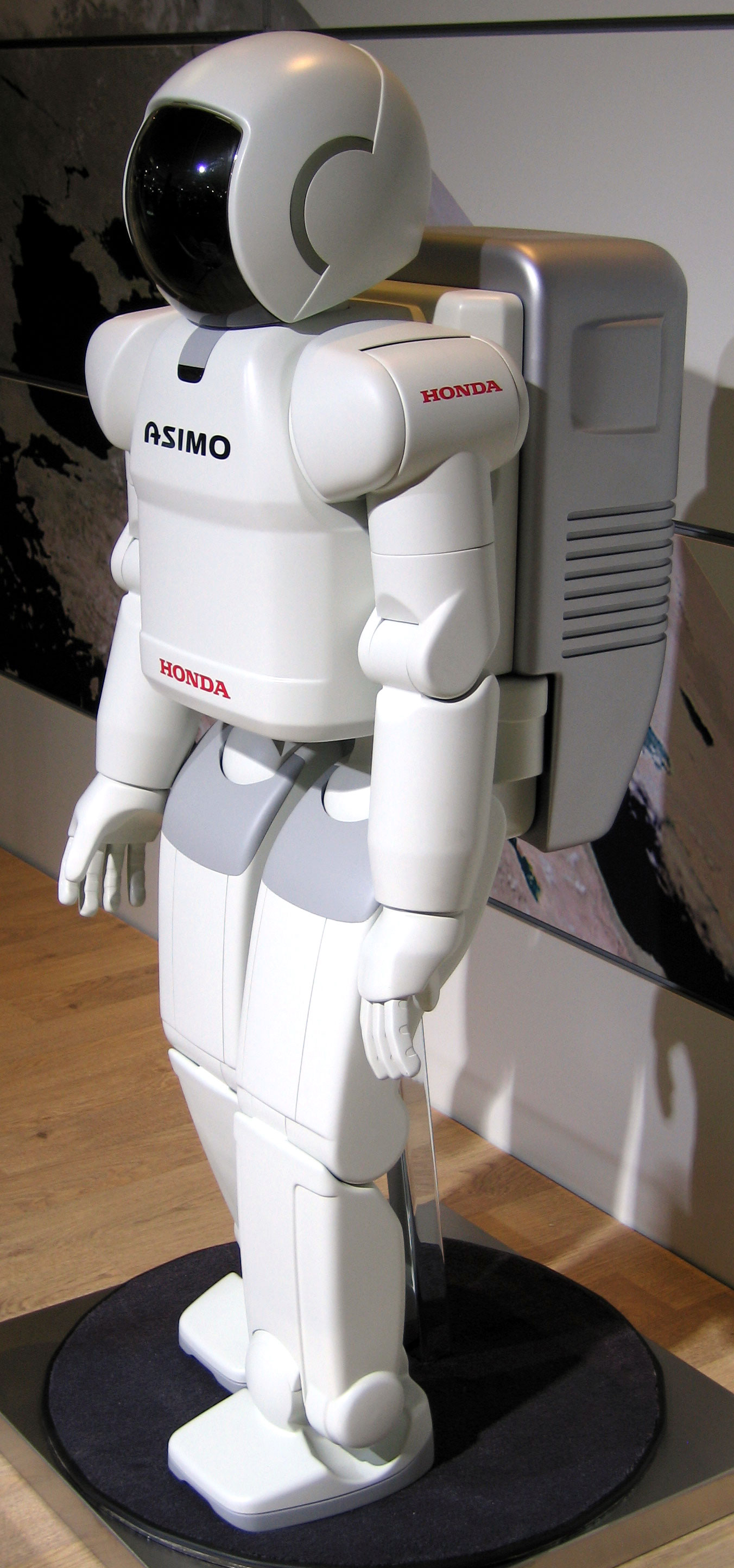
ASIMO is designed to operate in our world, where we need to reach for things, pick things up and navigate along floors, sidewalks ¢ even climb stairs. The robot has 7 DOF in each arm (two joints of 3 DOF, shoulder and wrist, and 1 DOF at the elbow); 6 DOF in each leg (3 DOF at the crotch, 2 DOF at the ankle and 1 DOF at the knee); and 3 DOF in the neck joint. The hands have 2 DOF Ś 1 DOF in each thumb and 1 in each finger. This gives a total of 34 DOF in all joints. Running speed - 3km/h; normal walking speed - 2,5km/h; height - 130cm; weight - 54kg; continuous operating time - 1hour.
see more here... and here (pdf)
Xianxingzhe
(2000)
The robot Xianxingzhe was a first China walking robot. The robot was able to walk at a rate of 2 steps per second, stood 140 cm tall, and weighed 20 kg. It was controlled by an embedded PC and had a total of 17 degrees of freedom (head x1, 2 arms x2, 2 legs x6) powered by 100W motors. The shoulder joint and elbow joint moved synchronously. The lights in its eyes would blink, it was able to walk, turn, ascend stairs and step over small obstacles measuring about 4 cm. Interestingly the ears are actually speakers, not microphones! The researchers believed that this technology could find practical use in limb rehabilitation, or perform work in toxic or radioactive areas.
Very interesting shoulder&hip joint design!
AR-600
The AR-600 stands 140cm tall and weighs 50kg. The robotÆs body is packed with about 100 tactile sensors which detect objects within 15cm and those in direct contact with the robot, which together with its ultrasonic range detectors and accelerometers lowers the risk of injuring bystanders. The AR-600 also has a sophisticated object recognition and classification software called E-frame which uses a tree-like structure, with individual objects being ōleavesö on the tree, which allows the robot to partially classify objects in its field of view.
The project is closed
BHR-2
(2005)

The BHR-2 (nicknamed Huitong) was unveiled in 2005. The robots stands 158cm tall, weight 76kg, and has 32 DOFs. It wrists and ankle joints is able to rotate a full 360 degrees. BHR-2 has a battery autonomy of about 30 minutes. The robot is famous for performing the ancient arts of shadow boxing (Taijiquan), and Tai Chi, and in one demonstration it swung a Chinese broad sword. It can walk with a speed approximately 1 km/h and a stride of 0.33 m. Having the mechanism, controlling, driving, sensors and power supply in all, the robot can adjust itself to the unknown height of the changing ground through its different sensors, i.e. it can sense changes in ground elevation which it uses to automatically balance itself.
BHR-3
(2009)
BHR-3 is a improved version of BHR-2 robot. The robot stand approximately 165cm tall and weigh 65kg. BHR-3 interacted with a crowd of bystanders through simple conversation, as children eagerly stepped up to the microphone to ask them questions such as, ōWhat are you?ö to which the robot replied: öI am a Humanoid Robotö. When asked if it could think on its own, the robot replied: öMy brain is a computer that can thinkö. Finally, when an old man praised the robot for being funny, it replied: öThank you. You are too,ö prompting laughter from the crowd.